仙知Roboshop Pro 使用入门(二)——查看基本信息与同步状态
仙知Roboshop Pro 使用入门(二)——查看基本信息与同步状态Roboshop Pro ®是 Seer Robotics ®(上海仙知机器人科技有限公司)
Roboshop Pro ®是 Seer Robotics ®(上海仙知机器人科技有限公司) 开发的用于移动机器人应用的专业级客户端软件。本客户端软件需要配合由【仙知机器人®】 提供的 【移动机器人】或【控制器】使用。
上期介绍了Roboshop Pro使用入门(一)——连接机器人,本期将介绍Roboshop Pro使用入门(二)——查看基本信息与同步状态;后续还会持续更新Roboshop Pro的使用,敬请关注!
所连接机器人的基本信息
当成功连接机器人后,在首页的机器人标签页中会显示所连接的机器人的基本信息。
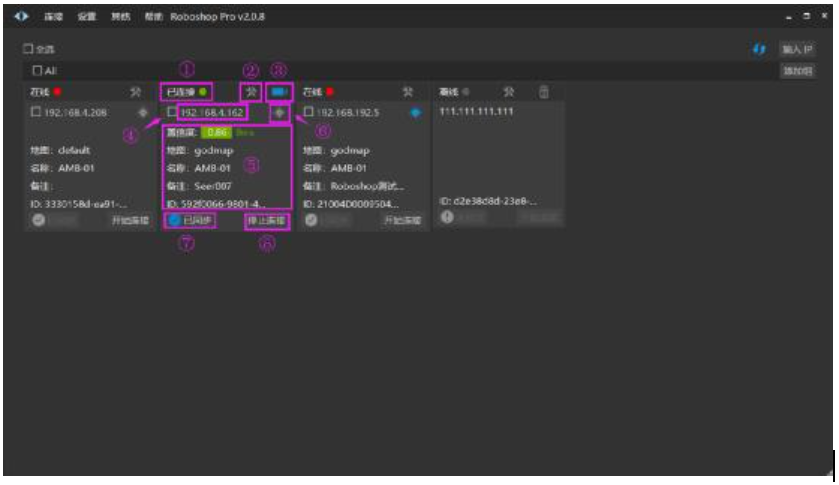
如上图所示,其中:
①机器人的连接状态显示。
②高级配置按钮,使用高级配置时点击使用。
③机器人当前的电量显示。
④机器人的IP。
⑤机器人的一些基本信息显示,本台机器人所在位置的置信度、网络延时、加载的地图名称、备注和ID等。
⑥标定图标,置灰为本台机器人未标定,高亮为本台机器人已标定。
⑦本台机器人的同步状态。
⑧连接机器人和断开机器人的按钮。
所连接机器人的同步状态
当连接成功机器人后,在首页的机器人标签页中会显示所连接的机器人的同步状态。同步状态分为“未同步”和“已同步”两种情况:
情况一:未同步
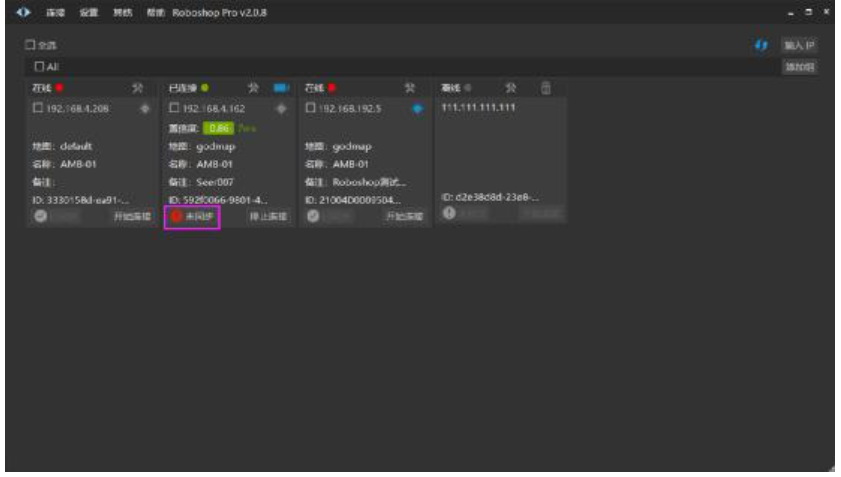
【未同步】是指当前机器人所加载的地图或模型文件中存在与 Roboshop Pro 中的地图或模型文件不一致的状态。
情况二:已同步
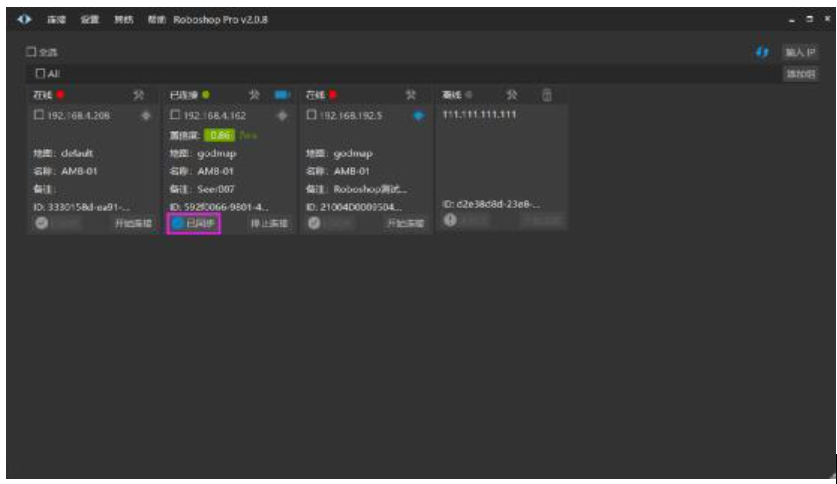
【已同步】是指当前机器人所加载的地图或模型文件中存在与 Roboshop Pro 中的地图或模型文件一致的状态。
●地图文件
地图文件的获取方式有两种:
①通过【地图与控制】中的【地图构建】获取(具体地图构建方法后续将会进行详细介绍)
②通过打开已有的地图文件获取(以.smap或.map为后缀名的文件)
●模型文件
模型文件的获取方式有两种:
①通过【地图与控制】中的【模型文件】进行配置获取(具体模型文件配置后续将会详细介绍)
②通过打开已有的模型文件获取(以.model为后缀名的文件)
本期内容分享到此结束
下期干货分享
仙知Roboshop Pro 使用入门
——“地图构建与地图修改”
敬请关注
有关仙知
上海仙知机器人科技有限公司,是一家以移动机器人控制与调度为核心的高新技术企业。作为一站式移动机器人方案专家,仙知机器人掌握了具有自主知识产权的移动机器人核心技术,并在工业自动化领域内拥有丰富的项目经验。仙知机器人致力于服务各行业集成商,并为其提供包括移动机器人控制、调度与信息管理在内的一站式移动机器人解决方案。
目前,仙知机器人的产品、技术及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、医疗教育等领域广泛应用。
仙知机器人积极践行企业使命—“让智能创造价值”,不断坚持技术创新,并以开放包容、合作共赢的姿态携手合作伙伴,最大程度地满足客户对产品、技术与解决方案的高品质追求,力争“成为机器人产业的创新者与引领者!”
-
防疫不止步,猎豹移动携猎户星空医疗机器人再进郑州“小汤山医院”2020-02-17
-
超3000家企业新增“口罩”业务:包括机器人、汽车、房地产企业2020-02-15
-
机器人也不容易 波士顿动力Spot被改造成电动车夫2020-02-15
-
扫地机器人十大品牌排行榜 口碑对比 选机必备2020-02-14
-
防疫从社区开始,百度地图上线周边疫情卡关注附近疫情分布2020-02-14
-
实用干货|仙知Roboshop Pro 使用入门(一)——连接机器人2020-02-14
-
普渡科技通过无人配送机器人减少疫区交叉感染2020-02-13
-
新松机器人:“疫”不容辞,我们“罩”你!2020-02-13
-
口罩博“疫”怎能少了机器人企业,拓斯达、新松等相继推出口罩生产设备(附口罩生产设备供应商)2020-02-13
-
动察|疫情之下 AI 机器人如何实现“无接触”操作?2020-02-13
-
别聚集扎堆,高德地图紧急在北京上线地铁客流情况查询2020-02-13
-
疫情之下 AI 机器人如何实现“无接触”操作?2020-02-13
-
搭载移远模组的送餐机器人驰援多个省市2020-02-13
-
联通在线“AI防疫调研机器人”助力疫情防控获好评2020-02-12
-
日本首个机器人调酒师上岗 售价为人类同行3年工资2020-02-12