为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。
仙知小课堂
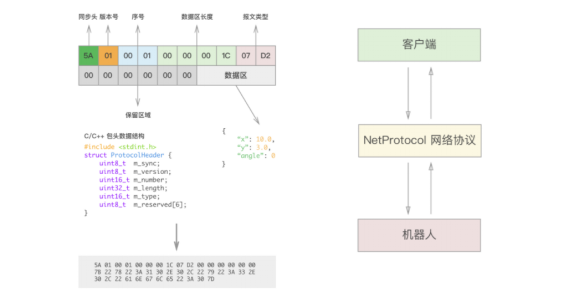
之前分别介绍了API列表、停止开环运动、重定位等,本期将介绍“确定定位正确”、“取消重定位”、“开环运动”及“切换载入的地图”:
确认定位正确
请求
编号: 2003 (0x07D3)
名称: robot_control_comfirmloc_req
描述: 确认定位正确
JSON 数据区: 无
请求示例

响应
编号: 12003 (0x2EE3)
名称: robot_control_comfirmloc_res
描述: 确认定位正确的响应
JSON 数据区: 见下表

响应示例

取消重定位
用于取消重定位过程, 如果当前正在重定位(即 reloc_status = 2 时)将取消本次重定位, 机器人的定位位置将回到发送重定位指令前的位置,并且reloc_status 将变为 3 (重定位完成)。如果当前没有正在重定位, 则本条指令没有任何作用。
请求
编号: 2004 (0x07D4)
名称: robot_control_cancelreloc_req
描述: 取消重定位
JSON 数据区: 无
请求示例
略
响应
编号: 12004 (0x2EE4)
名称: robot_control_cancelreloc_res
描述: 取消重定位的响应
JSON 数据区: 见下表

响应示例
略
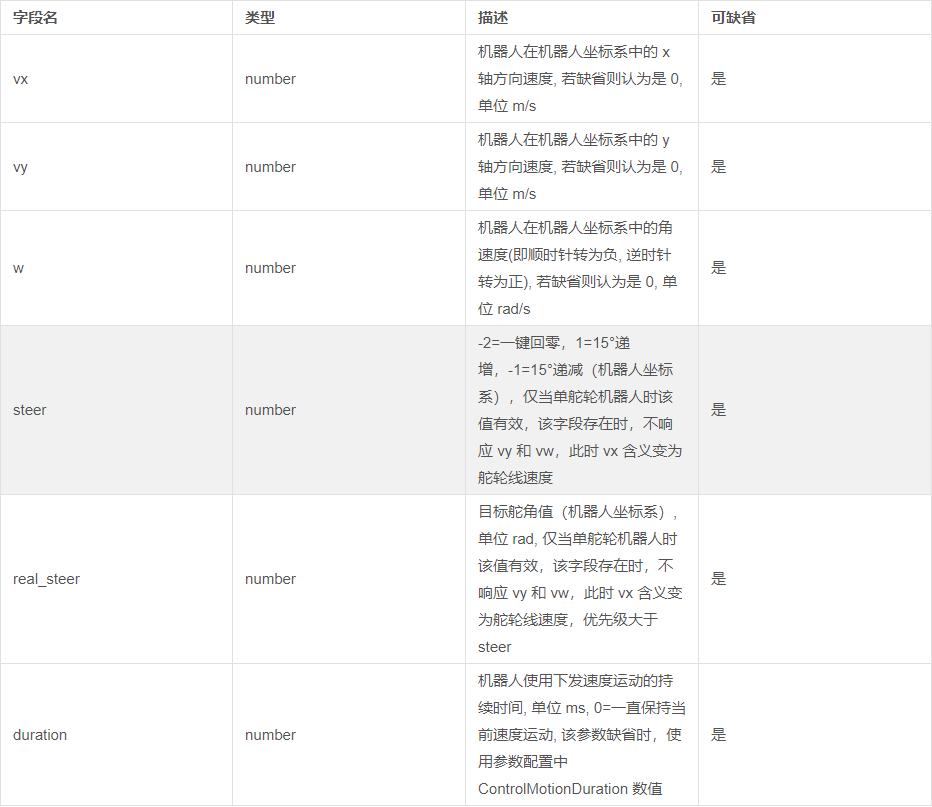
开环运动
针对多舵轮,只能通过vx vy w控制
请求
编号: 2010 (0x07DA)
名称: robot_control_motion_req
描述: 开环运动
JSON 数据区: 见下表
请求示例
略
响应
编号: 12010 (0x2EEA)
名称: robot_control_motion_res
描述: 开环运动的响应
JSON 数据区: 见下表

响应示例
略
切换载入的地图
请求
编号: 2022 (0x07E6)
名称: robot_control_loadmap_req
描述: 切换载入的地图
JSON 数据区: 见下表

请求示例
响应
编号: 12022 (0x2EF6)
名称: robot_control_loadmap_res
描述: 切换载入的地图的响应
JSON 数据区: 见下表

响应示例
略
有关仙知
上海仙知机器人科技有限公司,是一家以移动机器人控制与调度为核心的高新技术企业。作为一站式移动机器人方案专家,仙知机器人掌握了具有自主知识产权的移动机器人核心技术,并在工业自动化领域内拥有丰富的项目经验。仙知机器人致力于服务各行业集成商,并为其提供包括移动机器人控制、调度与信息管理在内的一站式移动机器人解决方案。
目前,仙知机器人的产品、技术及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、医疗教育等领域广泛应用。
仙知机器人积极践行企业使命—“让智能创造价值”,不断坚持技术创新,并以开放包容、合作共赢的姿态携手合作伙伴,最大程度地满足客户对产品、技术与解决方案的高品质追求,力争“成为机器人产业的创新者与引领者!”



