目前,新基建话题带来的热度还在继续,自动驾驶该如何搭上这一快车?自动驾驶又涉及到哪些核心技术?如何利用CAN智慧云提高自动驾驶安全性能?本文将对此做逐一介绍。
聚焦深度转型汽车行业,我们可以将自动驾驶车当作一个“拥有人类眼睛的智能轮式机器人”,可以识别周边的车辆、故障、行人等情况,并对此作出精准的行为。不难知道,自动驾驶依赖于了人工智能AI、传感器、大数据、5G等技术领域,幸运的是,自动驾驶站在这些技术的交汇处。
自动驾驶如何步入“快车道”?
自动驾驶为何会随着新基建带来的能量一起爆发,关键还是由自动驾驶的核心技术决定的。自动驾驶实际上包含了三个问题:一是我在哪儿?二是我要去哪儿?三是我要怎么去那儿?只有完美的解决这个三问题才能算是真正的自动驾驶,这其中包含的技术模块如图1所示。
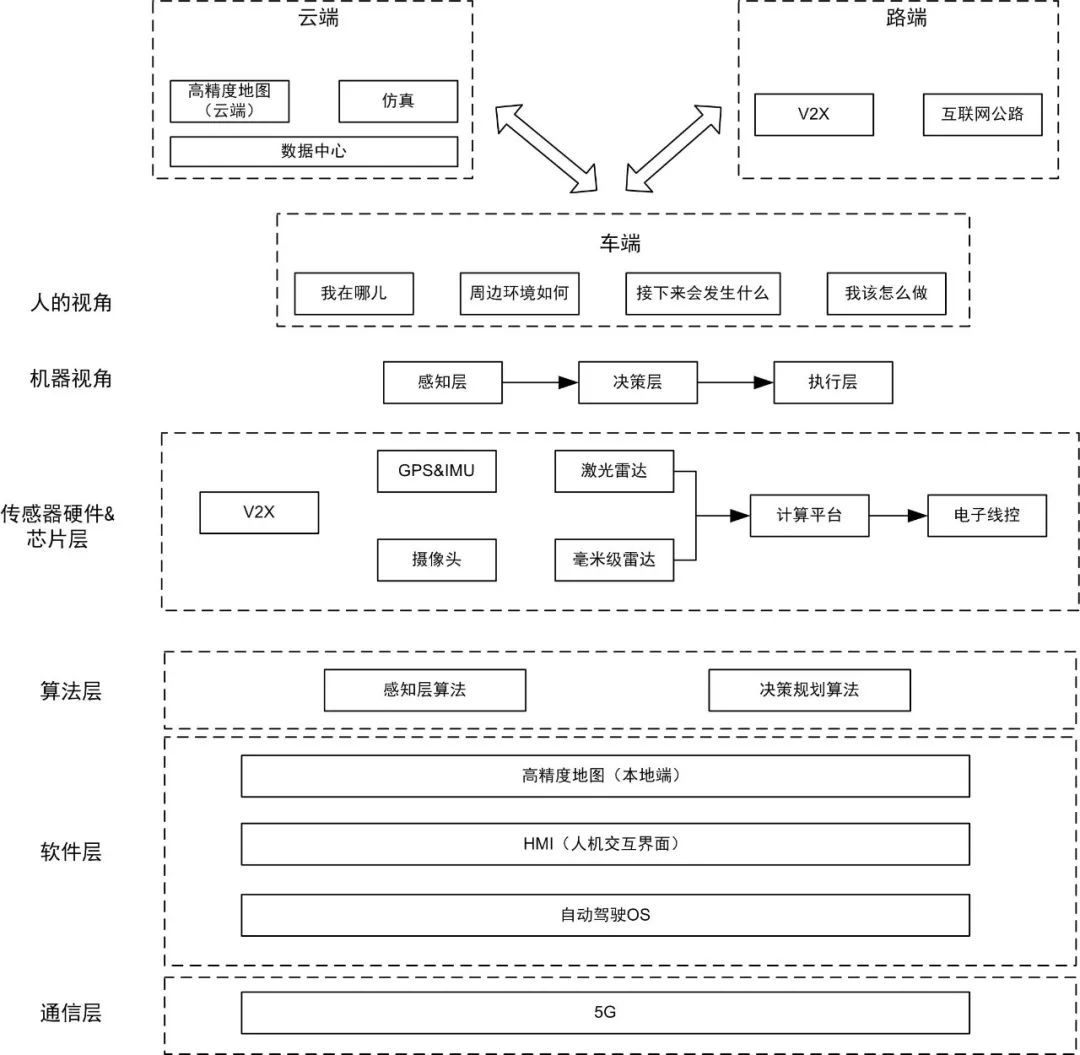
图1 自动驾驶技术框图
传感器技术:摄像头、激光雷达、毫米级雷达等传感器技术融合,识别外界环境;
高精度定位:运用GPS、GNSS、IMU等技术实现厘米级定位;
AI人工智能:关键技术,充分的利用所得信息进行分析,并决定车辆该如何行驶,算法的核心任务如图2所示;
V2X通信安全:包含汽车和用户信息,对用户的身份验证和给数据加密,依赖5G的大宽带,低延时信息交互;
HIM人机交互:人机交互界面用于人工处理自动驾驶机器人无法处理的情况。
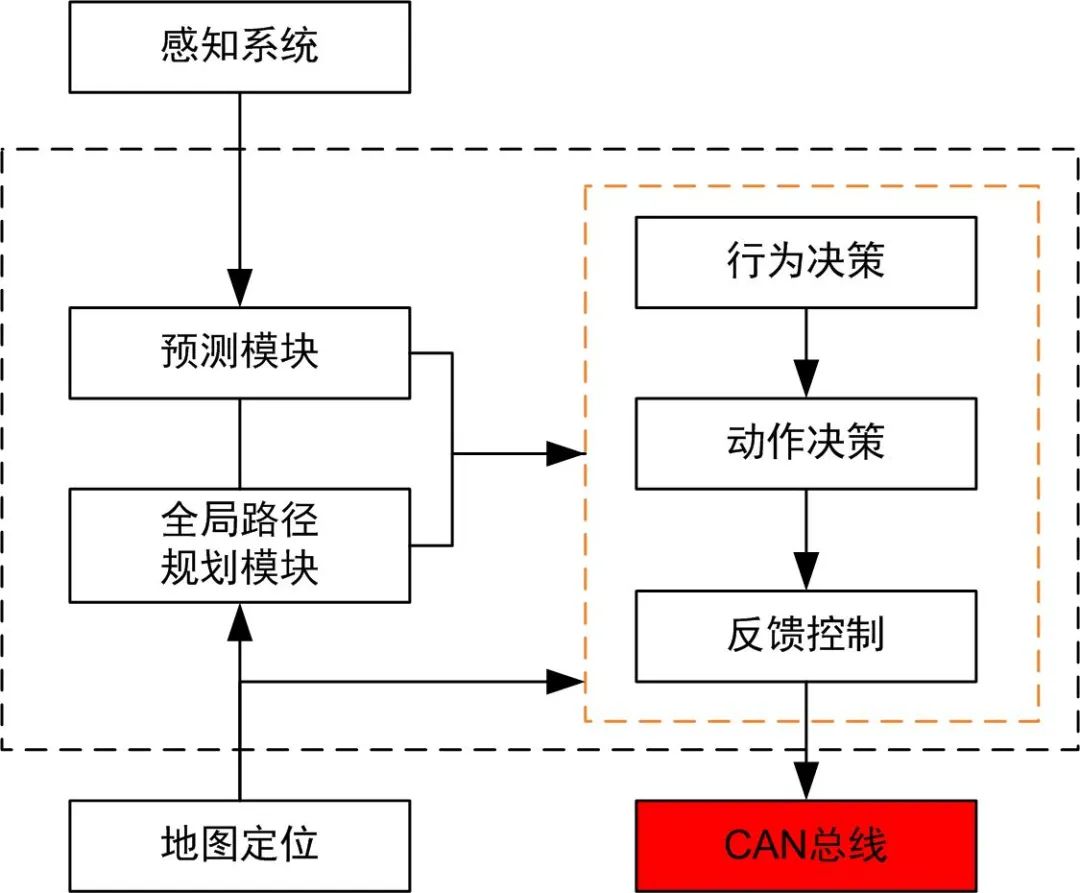
图2 自动驾驶AI核心算法任务
ZWS-CAN智慧云助力自动驾驶
上述图2所示,自动驾驶通过一系列的核心算法任务后,最终会通过CAN-bus总线来控制车辆ECU工作,所以CAN通讯的质量对自动驾驶车辆的性能影响巨大,同时,CAN通讯情况的反馈帮助优化AI算法。那么,在自动驾驶路试阶段,技术人员如何远程去实时分析车辆运行情况呢?