自动驾驶是未来的大势所趋。但现阶段,自动驾驶在技术等层面上依旧面临桎梏。比如,恶劣的天气条件就给自动驾驶汽车带来了挑战。
通常,自动驾驶汽车使用激光雷达和雷达来探测前方道路上的障碍物,但这两种系统依旧有其局限,尤其不善于在雾气环境中识别车辆。
其中,激光雷达(Light Detection And Ranging)传感器通过发射激光脉冲来测量物体的形状和距离,然后测量光线反射回物体所需的时间,激光雷达可以在晴朗的天气里绘制出高分辨率的三维图像,但在雾、灰尘、雨或雪中却看不见。
而雷达装发出无线电波,同样地,这些电波也会被位于其路径上的物体反射回来。雷打虽然可以在任何天气下都能看到,但它只能对探测到的东西产生部分图像,这是因为即使在理想条件下,它发射的无线电信号中也只有一小部分被反射回传感器。
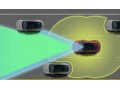
现在,加州大学圣地亚哥分校的一个研究小组通过在一辆车的引擎盖上安装两个雷达装置,将激光雷达和雷达的功能成功“折叠”,解决这一局限。两个雷达装置相距大约一辆车宽(1.5米/4.9英尺)。特殊的算法将接收到的反射信号组合起来形成一幅合成图像,同时也过滤掉不相关的背景“噪声”。
研究人员表示,通过在不同的有利位置和重叠的视场,他们创造了一个高分辨率的区域,很有可能探测到存在的物体。
随后的试验证实,在晴朗的白天和夜晚进行试驾中,该系统与激光雷达传感器一样,可以确定车辆在交通中行驶的尺寸。在模拟大雾天气的试验中,它的性能没有改变。研究小组用雾机“隐藏”了另一辆车,他们的系统精确地预测了它的3D几何结构。而激光雷达传感器则没有通过测试。
此外,更多的雷达意味着更多的噪音。因此,该团队开发了新算法,可以将来自两个不同雷达传感器的信息融合在一起,生成一幅没有噪声的新图像。
值得一提的是,该小组还构建了第一个数据集,将两个雷达的数据结合起来。这些数据来自视野重叠的多个雷达。该数据集由54000个雷达图像组成,包括白天和晚上在实时交通和模拟雾条件下的驾驶场景。研究人员表示,未来的工作将包括在雨中收集更多的数据。为此,研究小组首先需要为他们的硬件制作更好的保护罩。
目前,该团队正与丰田合作,将新的雷达技术与摄像头融合。显然,两只眼睛总比一只眼睛好,两个雷达的重叠也真是地改善了雷达的视觉效果。而其项目一经成功,也将具有极大的商业价值。