为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。之前分别介绍了仙知网络协议API的概念、类别、使用教程及如何查询机器人状态API中的“机器人信息”和“机器人运行信息”等,本期将介绍“如何查询机器人自由导航路径数据”、“如何查询机器人当前所在区域”及“如何查询机器人急停状态”:
如何查询机器人自由导航路径数据
查询机器人自由导航路径数据
请求
编号: 1010 (0x03F2)
名称: robot_status_path_req
描述: 查询机器人自由导航时的路径数据
JSON 数据区: 无
请求示例

响应
编号: 11010 (0x2B02)
名称: robot_status_path_res
描述: 查询机器人自由导航时的路径数据的响应
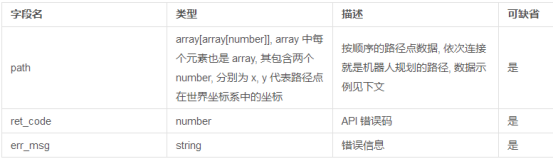
JSON 数据区: 见下表
响应示例
数据示例
如下为五个激光点的数据

如上的路径由 5 个点组成,5 个点分别为 (1.0, 1.2), (2.0, 1.3), (3.2, 2.1), (3.4, 1.4), (3.9, 1.5), 其坐标值为在世界坐标系中的坐标, 将这 5 个点按顺序连接即为机器人当前规划的路径。
响应示例

如何查询机器人当前所在区域
查询机器人当前所在区域
请求
编号: 1011 (0x03F3)
名称: robot_status_area_req
描述: 查询机器人当前所在的区域信息
JSON 数据区: 无
请求示例

响应
编号: 11011 (0x2B03)
名称: robot_status_area_res
描述: 查询机器人当前所在的区域信息的响应
JSON 数据区: 见下表

数据示例

响应示例

如何查询机器人急停状态
查询机器人急停状态
请求
编号: 1012 (0x03F4)
名称: robot_status_emergency_req
描述: 查询机器人急停按钮的状态
JSON 数据区: 无
请求示例

响应
编号: 11012 (0x2B04)
名称: robot_status_emergency_res
描述: 查询机器人急停按钮的状态的响应
JSON 数据区: 见下表

数据示例

响应示例
略
更多仙知网络协议API使用教程
后期将会陆续推出
敬请关注下期
仙知网络协议API使用教程(七)
仙知简介
上海仙知机器人科技有限公司,是一家以移动机器人研发与制造为核心的创新型公司。作为移动机器人领域内的高新技术企业,仙知掌握了具有自主知识产权的移动机器人核心算法,并在自动化行业内,拥有丰富的无人化项目经验。仙知机器人致力于服务自动化领域各行业集成商,并为合作伙伴提供全方位、场景化的产品、技术和解决方案。
目前公司为集成商提供的全系列激光导航移动机器人及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、科研教育等领域广泛应用。



