10月16日,在昆山举办的第四届SAE2019汽车智能与网联技术国际学术会议上,中科院自动化所王飞跃教授作大会报告,讲述了平行认知自动驾驶理论及其当前的矿山无人化应用。王飞跃教授认为,有人车和无人车在道路上混合行驶只是一个过渡时期,未来一定会走向全面自动驾驶时代。同时,王飞跃教授为我们介绍了基于平行驾驶的特定场景下自动驾驶成功应用的案例。
混合只是一个过渡时期
会上,王飞跃教授就道路和车辆的起源讲起,告诉我们什么是“马路”?以前,马走在路上,便称之其为“马路”。马路是曾经推动社会进步的巨大载体,而未来的道路会是什么样子的呢?王教授认为,有人车和无人车同时上路是未来交通发展的过渡阶段,就像马车和汽车混合行驶一样,至少要持续十几年。未来以更加智能、高效、节能为核心理念设计的无人车,将会彻底把人从驾驶员位置上取代掉。普通的交通运输不再需要人类驾驶员,只有特殊场景下,比如F1赛场上,人类为了乐趣而竞技的情况才需要人类驾驶员驾驶汽车。

目前,无人驾驶汽车上路存在诸多难题,不过这在王飞跃教授眼中都是暂时的“马粪问题”,新技术的产生将让这些难题“像马车消失马粪不在一样自动”消失。
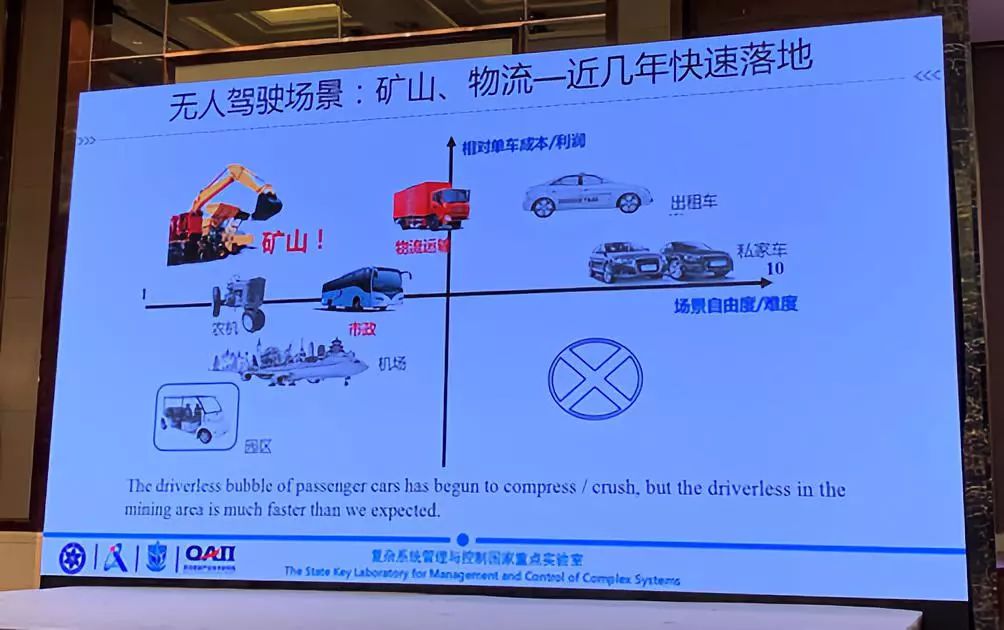
王飞跃教授表示,从环保、资金投入等角度看,目前大力推广无人驾驶汽车太过着急,可以率先应用于一些特殊的场合,逐渐从矿山、物流(包括码头)、市政落地,慢慢发展到出租车、完全无人驾驶汽车。也就是说,目前应该从特殊场景入手,结合技术的延续性,思考未来交通的顶层架构。当道路基础设施、通信技术、车载硬件技术以及算法发展完善后,再推动完全无人化,会少走很多弯路。所以“2050年落地也不迟。”
认知科学与自动驾驶
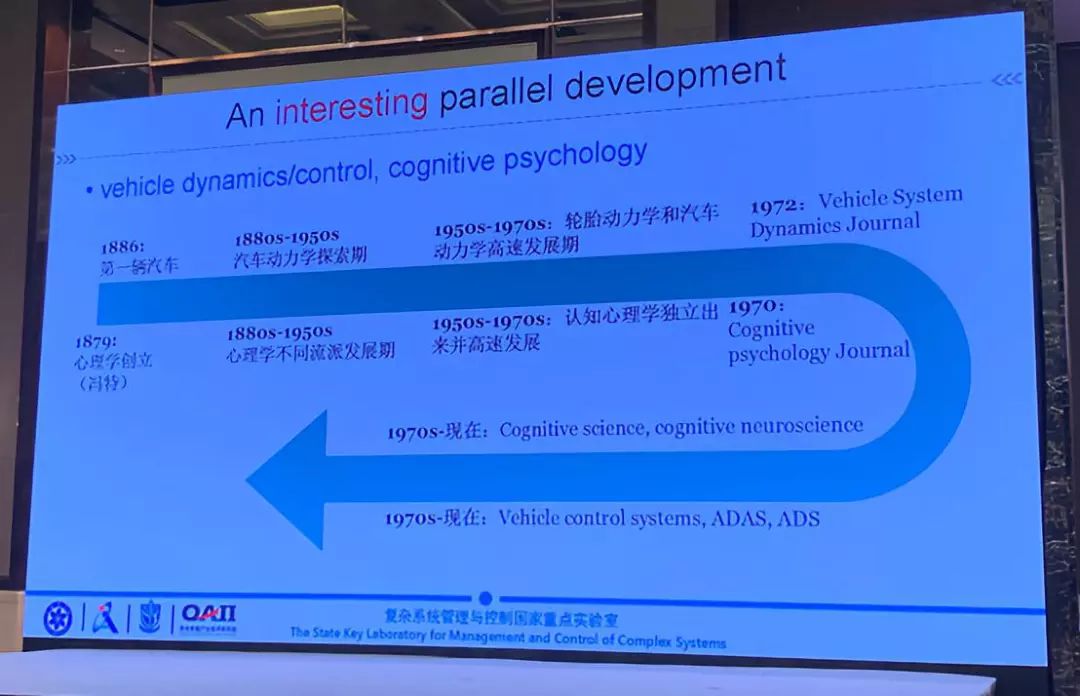
认知科学与汽车这一课题主要分为认知自动驾驶(Cognitive autonomous driving),情绪认知自动驾驶(Emotionally cognitive autonomous driving),和社会认知自动驾驶(Socially cognitive autonomous driving)三大部分。从历史的角度看,心理学的历史和车辆的发展史基本是同步的,1950年-1970年有一个爆发期,认知心理学从心理学中独立出来,在这个阶段轮胎动力学和汽车动力学也高速发展。在自动驾驶快速发展的今天,认知心理学与自动驾驶融合的需求越来越大。
“认知”还是造成自动驾驶晕动症主要诱因。王飞跃教授生动地解释了为何开车的人不容易晕车,而坐车的人往往很容易晕车的原因。开车的人,在车辆姿态发生变化前,自己的大脑就已经“提前做好准备”,知道即将发生的车身姿态的改变;而坐车的人往往是“被动”地接受这种车辆状态的改变,导致在横向上有了较大程度的认知区别,这就是晕车的主要原因。对此,王教授团队也正在研究自动驾驶规划和控制算法,以减轻晕动症。
平行驾驶及矿山无人化应用

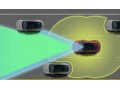
最后,王飞跃教授详细阐述了基于CPSS的平行驾驶系统。虚实互动的平行驾驶就是通过人工系统对实际无人车和路建模,构建软件定义车辆及车路系统,软件定义的汽车(人工汽车)和物理汽车一起开,而且一部物理汽车要对应三部软件汽车:一部用来做描述,与物理车通过无线传感网联在一起,描述车辆的即时状态,不论开到哪里都受监护;一部用来做预测,前方道路是否发生事故,是否拥堵,预测车辆都能提前预测;还有一部用来做规划和引导,给你提方案,怎样路线最好,最省油,最节约时间。物理汽车和虚拟汽车同步行驶,保证在物理世界安全,在精神世界安全,在智能世界安全,实现300%的安全。

谈到平行驾驶技术近年来的发展,就必须要提到一家中科院系的慧拓智能机器有限公司,该公司以ACP平行理论为基础,致力于新一代云端化智能网联自动驾驶技术的研发及产业化。近期,慧拓与吉利合作的平行驾驶,与徐工合作的平行矿山,与一汽合作的平行物流开展合作,用平行系统代替了恶劣条件下人类岗位,为特定环境下的工作人员带来福音。例如,在矿山中工作的人类司机,经常因为道路不平条件恶劣,无法规律饮食,而造成胃下垂或其他胃病;又或者因为工作环境粉尘较大,长期会有得矽肺病的危险。相信,在平行驾驶系统的不断完善下,会越来越多的帮助人类司机免受职业病的危害,也会有越来越多的应用场景,提高生产生活的效率,让智能造福人类,让人类享受智能。

慧拓智能还于去年3月18日,在中国智能车综合技术研发与测试中心(常熟)发布“第三代平行驾驶系统”,公开演示了“驾驶员”如何利用平行驾驶管控中心的遥控驾驶系统中远程管理并控制在真实道路上行使的多辆无人驾驶车。于去年6月30日,在IEEE IV 2018 On-Road Demonstration国际智能车联合道路演示上,展示了平行驾驶3.1版,现场演示了一般交通场景响应式接管、紧急交通场景主动接管、主动避障、中心驾驶员实时状态检测四个部分。围绕“平行驾驶”框架的平行驾驶3.1系统,通过平行驾驶管控平台流畅的管理多台无人车,让无人车更安全平稳的在道路上行驶,这无疑是自动驾驶技术的落地提供了一种安全、可靠、高效的实施方案,实现道路上混合车辆系统(有人驾驶、自动驾驶、无人驾驶)的安全平稳智能管理,同期也成立了一个国际平行驾驶联盟(iPDA),由18所学校参加进来共享数据。

在报告的最后,王教授表示,像诸如此类的矿山或物流等特殊场景将会最先实现无人驾驶,同时让有人车、遥控车、网联车、无人车、平行车一体化。“让我们共同期待平行驾驶”。