Roboshop Pro是Seer Robotics(上海仙知机器人科技有限公司)开发的用于移动机器人应用的专业级客户端软件。软件集成了机器人控制,地图构建及编辑,机器人建模等移动机器人应用中常用的功能,旨在为用户提供快速、准确、稳定的移动机器人解决方案。
本期将详细介绍如何利用Roboshop Pro进行地图构建及环境要求。地图构建共分为机器人连接、SLAM(在线建图)、离线建图三个部分,具体操作步骤如下:
机器人连接
第一步:如下图所示,启动Roboshop Pro软件,进入软件【首页】
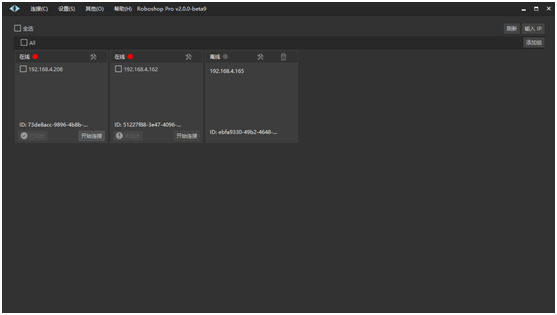
第二步:如果要连接的机器人在当前列表中,并且处于【在线】状态,点击【开始连接】进行连接机器人;如果机器人不在当前列表中,点击右上角【刷新】按钮或【输入IP】手动输入,进行连接机器人。
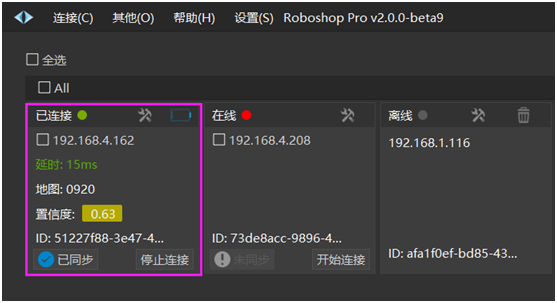
第三部:连接成功后,双击框内空白区域进入操作界面。
构建地图有两种方式,分别为SLAM(在线建图)和离线建图(扫描rawmap、加载rawmap进行建图、下载rawmap进行建图)。
点击RoboshopPro中的构建地图按钮,将弹出以下4个选项:
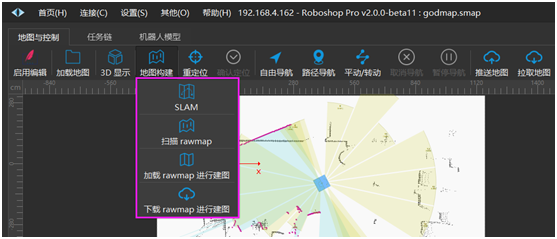
SLAM(在线建图)
SLAM(在线建图):即同时进行环境数据的扫描和地图构建。遥控机器人在环境中运行时可以实时生成地图。
点击模块工具栏中【地图构建】-->【SLAM】,即可以进入到SLAM建图功能,此时如果弹出Windows防火墙警告,请按照下图同时勾选专用网络和公用网络,并点击【允许访问】。如果只勾选了一个,可能导致计算机连接到其他网络时RoboshopPro的SLAM功能无法正常使用。如果有其他杀毒软件或防火墙弹出拦截,也请点击【允许】。
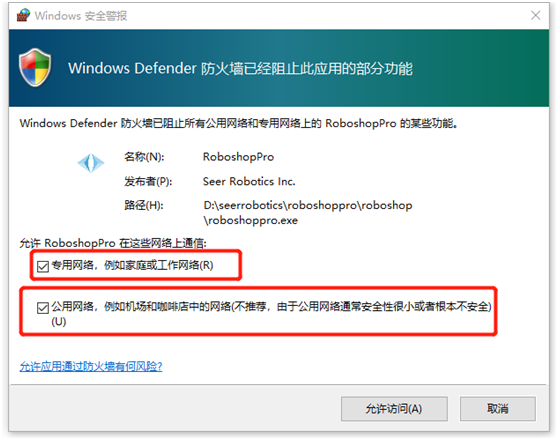
第一次弹出防火墙窗口并点击允许后需要退出SLAM窗口,然后重新点击【地图构建】-->【SLAM】才能正常使用。
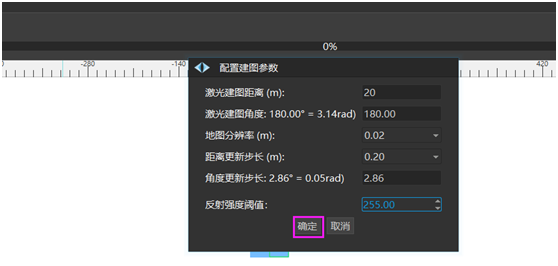
在弹出的配置建图的对话框中,点击【确定】按钮,如下图所示:
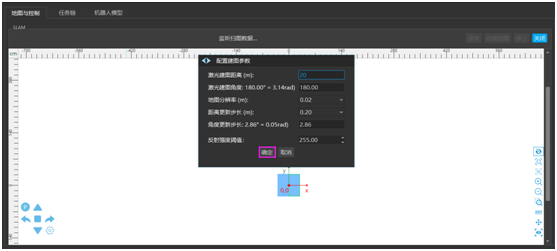
注1:弹出窗口中的参数为根据使用的激光雷达自动识别的参数,一般情况下请勿修改。
注2:如果没有自动弹出建图参数的窗口则说明数据被拦截了,请关闭杀毒软件的防火墙和Windows防火墙。
然后使用键盘的W、A、S、D键对机器人进行遥控,使其在环境中运行一圈,如下图所示:
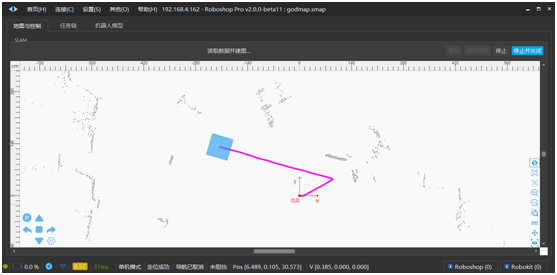
尽可能使激光从各角度扫描到环境中的物体,即控制机器人在实际运行的线路上来回走两遍。对于有特征的地方(非平整的墙面)可以着重扫描。
若要查看当前已构建的地图全貌,按住Ctrl并在SLAM的窗口中滚动鼠标滚轮即可缩放,或者使用右下角的放大缩小按钮。
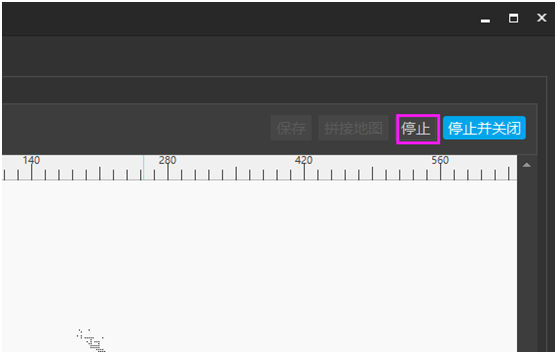
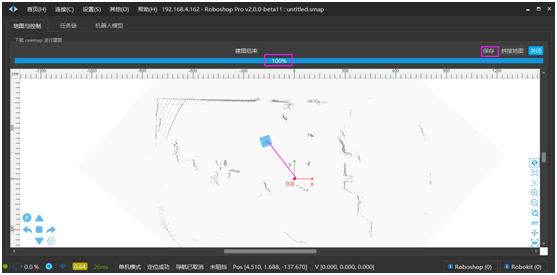
扫面完成后,点击右上角的【停止】按钮,此时可能需要等待几秒让程序对地图做最后的优化。
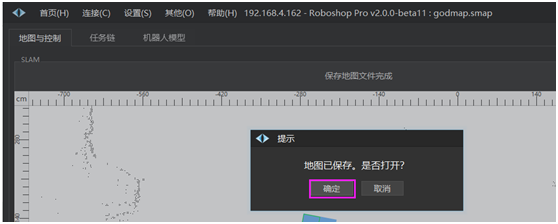
点击【保存】即可将所扫描完成的地图进行保存操作。
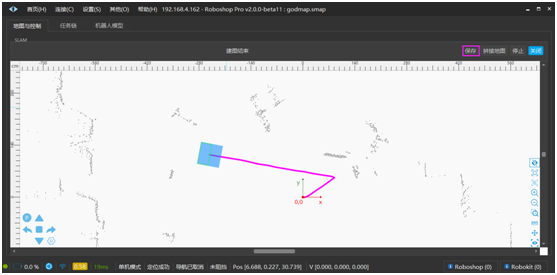
当保存完成后,软件会弹出以下对话框,询问是否直接将刚才所保存的地图打开,若需要直接打开,点击【确定】按钮。
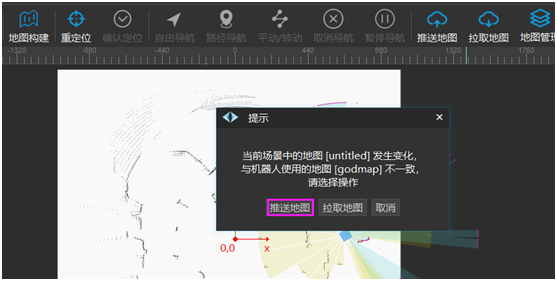
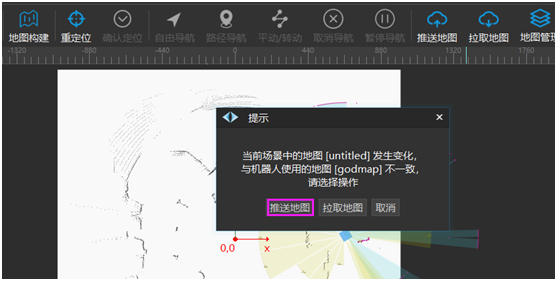
打开新构建的地图后会弹出地图数据不一致的提示框,选择【推送地图】,即可让机器人使用新构建的地图。
至此,【SLAM】进行在线建图已经完成。
离线建图
离线建图分为两步,首先是扫描得到rawmap数据,然后使用rawmap数据进行建图。
1. 扫描rawmap
扫描rawmap即扫描环境数据,需要遥控机器人在环境中运行一圈。
与【SLAM】不同的是,该种建图方式不会实时显示机器人的运动轨迹和实时构建的地图。
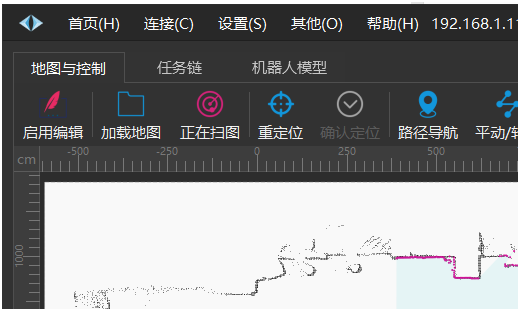
点击【地图构建】-->【扫描rawmap】后立刻进入扫描模式,可以看到如下图中构建地图按钮变成了粉色的【正在扫图】按钮。
然后使用键盘的W、A、S、D键对机器人进行遥控,使其在环境中运行一圈后,点击【正在扫图】-->【停止扫图】。

此时Roboshop会自动从机器人中下载rawmap数据,待数据下载完成后会自动弹出与【SLAM】相同的建图参数的对话框,点击【确定】按钮即开始地图构建。
若要查看当前已构建的地图全貌,按住Ctrl并在窗口中滚动鼠标滚轮即可缩放,或者使用右下角的放大缩小按钮。待进度条至100%后建图完成,点击【保存】按钮即可对地图进行保存,保存完成后,软件会弹出对话框询问是否直接将刚才所保存的地图打开,若需要直接打开,点击【确定】按钮。
打开新构建的地图后会弹出地图数据不一致的提示框,选择【推送地图】,即可让机器人使用新构建的地图。
至此,【扫描rawmap】进行离线建图已经完成。
2. 加载rawmap进行建图
rawmap为机器人扫描环境后的原始数据,通过加载.rawmap文件也可以构建地图。每次离线建图后后Roboshop Pro都会将rawmap文件进行备份,储存于RoboshopPro安装目录的appinfo/<机器人数据>/rawmaps文件夹下(以生成的日期时间命名)。
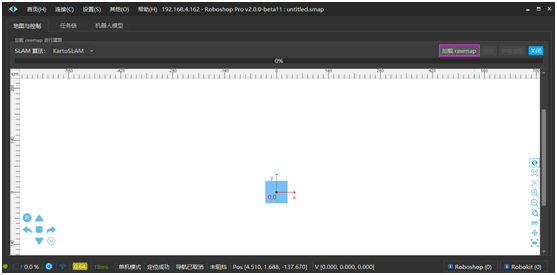
若要使用该方式进行建图,点击【地图构建】-->【加载rawmap】,在所打开的窗口中点击【加载rawmap】按钮:
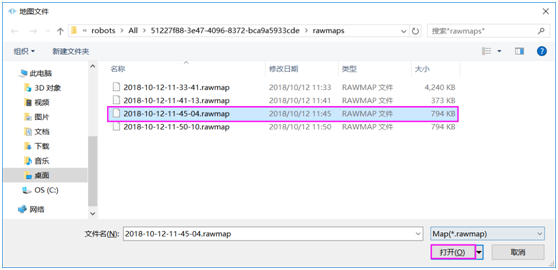
在打开的文件选择窗口中选择期望的.rawmap文件【打开】
在自动弹出的建图参数的对话框中,点击【确定】按钮,等待建图进度条至 100% 后进行保存操作即可完成建图。
3. 下载rawmap进行建图
该建图方式主要用于不慎在建图过程中将建图窗口关闭,或地图构建完成后忘记另存为.smap就关闭了窗口的情况。此时可以点击【地图构建】-->【加载rawmap】按钮,Roboshop Pro将最近一次的扫描数据重新取回(如果存在)并重新唤出建图窗口。后续使用方法与上文中相同。
环境要求
机器人对使用的环境是有一定要求的,下面列举了一些常见的不适合机器人运行的环境,请避免这些情况或做相应的处理。
(1)环境的材质
以下环境材质会对机器人的建图及定位导航造成影响:
机器人的激光雷达无法正确扫描表面呈镜面反射的物体(如镜子、光滑的金属表面等)
机器人的激光雷达无法正确扫描透明后半透明的物体(如玻璃、部分毛玻璃等)
机器人的激光雷达无法正确扫描黑色的物体,黑色将吸收所有光线,使激光雷达的有效距离降低甚至失效。
如果遇到以上三种情况,需要在环境中的机器人激光雷达所在平面黏贴3M反光条,用于遮挡镜面、玻璃或黑色物体。
(2)环境的轮廓
以下环境会对机器人的建图及定位导航造成影响:
非常空旷的环境,有较多空旷区域的范围大于激光雷达的有效距离,即机器人在这些空旷区域里几乎扫描不到有效的环境特在
解决方法:使用有效距离更大的激光雷达
非常杂乱的环境,机器人无法获得良好的环境轮廓
解决方法:整理环境,移除无用的物体
有较多区域极其相似的环境,机器人无法根据环境轮廓辨别位置
解决方法:在环境中随机增加一些有特征的标志物
没有特征的长廊环境,长廊的两边墙面没有任何可参照物或者参照物非常有规律从而无法获得有效的特征
解决方法:在环境中随机增加一些有特征的标志物
极易变化的环境,短时间内就会发生较大改变的环境将使机器人无法构建出正常的地图,或者使已构建的地图失去可参照性
解决方法:避免或减少环境发生较大的变化



