苏黎世灵活双轮平衡机器人送披萨,奔跑自如小型机器人
苏黎世灵活双轮平衡机器人送披萨,奔跑自如小型机器人为解决最后一公里问题,街头除了像钢铁侠似的饿了么小哥装备的外骨骼,也有迷你轻巧的小家伙,苏黎世团队研究人员们研发出一款具有平行弹性
为解决最后一公里问题,街头除了像钢铁侠似的饿了么小哥装备的外骨骼,也有迷你轻巧的小家伙,苏黎世团队研究人员们研发出一款具有平行弹性跳跃机构的双轮平衡机器人——Ascento。二代的Ascento重10.4公斤,最高跳跃高度为0.4米,速度可达每小时8公里,是为室内环境设计的紧凑灵活的跳跃机器人。


送披萨引起大家的注意


在演示视频中,机器人在受到强烈的摆锤撞击后能保持平衡。
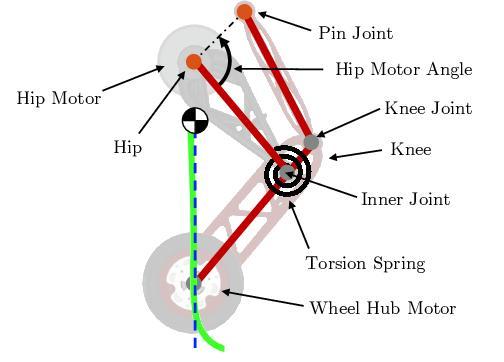
Ascento结合了两种类型的机器人的优势。它站立在两个大轮子上,但是三段式腿将它们连接到身体上。机器人通过四个马达保持平衡和机动:其中两个位于车轮中,另外两个安装在腿部与身体的连接处。
Ascento的腿彼此独立,可以分别拉直或弯曲。将支腿保持在稳定的弯曲位置的工作主要是通过安装在支腿两个主要部分连接处的扭力弹簧来完成的。
Ascento项目由苏黎世联邦理工学院的9名本科生组成的团队运作。最初,该机器人具有良好的设计,但是由于算法的原因,其优点并未得到充分披露,并且使其无法实现与两足轮机器人波士顿动力Handle机器人相同的技能。机器人最初能够跳到小高度并且跌倒后起身。使用新版本的控制算法,具有相同设计的Ascento变得更加稳定,并能够抵抗外部干扰。
轮子和腿的组合使它能在平坦的地面上快速移动,并通过跳跃来克服障碍。它身材小巧,能够在室内自由活动,展示出了令人眼前一亮的室内灵活性和机动性。
由一篇题为Ascento: A Two-Wheeled Jumping Robot的文献我们了解到,该机器人主要用于室内巡检,平整地面用轮子快速移动,并通过跳跃来越障。
文章主要展示了Ascento能够在平坦的表面上快速导航,并通过跳跃越过障碍。该系统的拓扑优化、3D打印机械设计已被证明重量轻且耐冲击。此外,基于模型的鲁棒LQR控制器已在原型系统上成功实现。在原型系统的多项实验中,展示了自主跳跃到一个台阶上,以及从跌倒中恢复到不同位置的能力。最后,机器人的操作环境可以通过结合腿部机器人的地形适应原理从室内扩展到室外。
根据论文介绍,Ascento的结构是利用 topology optimization (拓扑优化)创建的,并且是3D打印的。优化的结构使得移动和跳跃能够解耦,并使机器人能从各种倒地只带恢复。平衡稳定采用 linear quadratic regulator (LQR) controller(线性二次调节器)进行控制,跳跃和倒地恢复使用 sequential feed forward controller with feedback tracking (顺序前置反馈)控制。
事实上,巡检机器人在工业和家庭中都有很广泛的应用。现有的无人机虽然能够满足易操作和很好的机动性,但是负载能力差、飞行时间短。苏黎世团队阐明了现在轮式或足式机器人在单方面的性能很优秀但是却不能做到兼顾其它能力。而履带式机器人的精度差、效率低(由于打滑)。因此有必要结合轮、足两者的优势。
-
Libos锂博士激光扫地机器人 科技改变生活2020-05-07
-
匈牙利初创企业开发人力资源招聘网络面试机器人2020-05-07
-
2019年中国工业机器人行业分析2020-05-07
-
奥维数据:扫地机器人科沃斯优势明显,超过第二名9.4倍2020-05-07
-
极智嘉Geek+助力打造乐友机器人智能物流中心,实现物流创新升级2020-05-06
-
机器人电缆新秀登场--东莞菲尔德线缆科技有限公司2020-05-06
-
康复机器人研发商“傅利叶智能”完成数千万元B+轮融资2020-05-06
-
机器人应用已成“双刃剑”,如何破局?2020-05-06
-
5G时代下,移动机器人如何出其“智”胜2020-05-05
-
盘点那些被谷歌收购的机器人公司2020-05-04
-
国产工业机器人与进口的差别在哪里?2020-05-03
-
机器人将为医疗行业带来巨大变革2020-05-02
-
解放双手,一大波“机器人劳动者”助你欢度五一2020-05-01
-
协作机器人如何在极限环境下工作?2020-04-30
-
KT又出手了!与韩国现代机器人联手推出第二代AI酒店机器人Enbot2020-04-30