软件究竟如何定义汽车【二】?
软件究竟如何定义汽车【二】?一、智能电动汽车软件范畴按照新能源汽车的特点以及中央计算电子电气架构的发展趋势,可以按照以下三个类别,对智能汽车软件进行分类:动力与底盘控制器、车身控制
一、智能电动汽车软件范畴
按照新能源汽车的特点以及中央计算电子电气架构的发展趋势,可以按照以下三个类别,对智能汽车软件进行分类:动力与底盘控制器、车身控制器、中央计算单元。
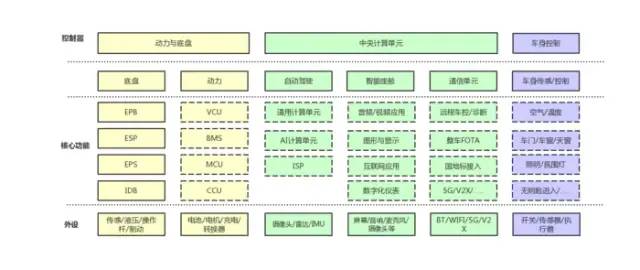
智能电动汽车软件分类.jpg
动力与底盘控制器
底盘类的功能,包括电子转向(EPS)、电子驻车(EPB)、车身稳定(ESP)、集成动态制动(IDB)等等,都是牢牢的掌握在了一线Tier手里,这部分软件都是和机械零部件绑定在一起的,在其整个生命周期内不会发生功能的改变(可能会重新标定新的参数),实现的是车辆运行最基本的、有最高功能安全等级要求的、微秒级时延的功能。所以即使是在集中式的电子电气架构下,未来很长一段时间,这部分功能都会以独立ECU的方式存在,遵守Classic AutoSAR标准进行开发。
在“动力与底盘”控制器中,整车厂唯一可以做并且非常有必要的是,提供一个底盘域的适配层,为中央计算单元提供标准的线控服务,这样以来,中央计算单元就不用单独和各个底盘ECU通信(不同车型可能使用了不同Tier1的产品),可以做到中央计算单元和车型平台解耦。
动力类包含了新能源三大核心技术,整车控制器(VCU)、电机控制器(MCU)和电池管理系统(BMS),其中VCU通过采集油门踏板、挡位、刹车踏板等信号来判断驾驶员的驾驶意图;通过监测车辆状态(车速、温度等)信息,向动力系统、动力电池系统发送车辆的运行状态控制指令。BMS负责估测动力电池组的荷电状态 SOC,即电池剩余电量,保证SOC维持在合理的范围内,同时监测电池充放电过程中的温度、电流、电压等,保持整组电池运行的可靠性和高效性。MCU系统根据数学模型,采集位置、电流信号,对IGBT进行通断控制,形成交变磁场,从而控制电机按目标进行运转。这三大部件对整车性能有着重要影响。越来越多的主机厂选择自己进行开发,也就有了往集成化方向发展的基础,可以逐步将功能迁移到“底盘与动力”控制器当中去。
车身控制器
传统也叫BCM,车身控制相关的功能包括,车门、车窗、天窗、雨刮、照明、空调、空气净化、无钥匙进入等等,整车厂对这部分具有很高的决定权,现存的绝大部分ECU上的功能都可以搬到车身控制器上去,按照开关、传感器、执行器的维度对原有ECU的功能进行分解,主机厂可以自己开发,也可以要求Tier1按照规范提供软件模块,由主机厂进行集成。
中央计算单元
中央计算单元的集成的三个重要模块分别是自动驾驶、智能座舱、通信单元。为什么把这三块放在一起,下一章会详细介绍,本节重点介绍其内容。
自动驾驶,软件上具体的要做的事情,上一篇有过介绍,其核心是算法和数据的积累,稍微有点实力的主机厂都不会放弃自主研发,因为一旦掉队,短时间追不上来,也将彻底沦为硬件的代工厂,这是一个需要长期高投入的领域,在这个领域当中,主机厂、算法商、Tier1等各自的分工,也都还在探索当中。传感器与芯片算力,是发展中的主要制约因素。
智能座舱,各个主机厂都在做,其技术和生态是消费电子在车场景的延展,一般会选择一家互联网公司合作,其核心还是围绕了人机交互展开,探索人与设备之间的关系,目前最主要的两大交互方式就是触屏+语音,对整车硬件的智能化的水平有很高的要求,但是车载硬件算力的滞后特性,导致功能体验不如消费电子。
通信单元,也叫TBOX,是车与外界联系的枢纽,目前主要实现的功能,如远程车控、远程诊断、整车OTA、国地标数据采集等等,与车的联系非常紧密,主机厂一般都会自己开发上面的应用软件。其发展和通信标准的强相关,比如4G到5G的切换,未来技术上影响较大的因素是V2X,其发展会改变目前的软硬件架构。
3 首页 下一页 上一页 尾页-
每周损失3亿美元 马斯克急需特斯拉开工 特朗普:我支持复工2020-05-13
-
特斯拉强行复工,CEO马斯克:要抓就抓我2020-05-13
-
中国电信:打破信息孤岛,推动物联网“碎片化”变“服务化”2020-05-13
-
特斯拉正式宣布违反命令 强行复工!马斯克:“要抓就抓我吧!”2020-05-12
-
AI基础架构火热开建 GPU服务器大显身手2020-05-11
-
特斯拉美国工厂将仿照上海超级工厂模式复工2020-05-11
-
商用车维保服务商共轨之家完成亿元级B轮融资,万融资本领投2020-05-11
-
特斯拉工厂复工遭拒:起诉政府、威胁搬厂,特斯拉演了一出大戏2020-05-11
-
Open RAN政策联盟宣布成立;中国电信大手笔集采国产CPU服务器2020-05-11
-
支持门诊开展线上预约服务的家长比例从78%提升至92%2020-05-11
-
一周股评 | 都是新政惹的祸,又被特斯拉割韭菜2020-05-11
-
顺丰推出“丰食”平台为企业员工提供送餐服务2020-05-11
-
服务近20年后 前董事长、CEO施密特卸任所有职务:彻底告别谷歌2020-05-10
-
机器人儿童培训服务提供商“贝尔科教”完成新一轮融资!2020-05-09
-
计算能力每秒1亿亿次的内蒙古高性能计算服务平台即将进入调试期2020-05-09