激光雷达类型:TOF雷达VS三角测距雷达
激光雷达类型:TOF雷达VS三角测距雷达如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前
如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前激光雷达应用最为火热的领域之一,按照不同的技术路线,可将机器人激光雷达分为TOF激光雷达及三角测距激光雷达两大类型。
TOF激光雷达
TOF激光雷达是一种进行光飞行的时间的测量方法,顾名思义就是发射出一道激光,然后会有一种二极管来进行激光的回波检测,再使用一个很高精度的计时器去测量光波发射到目标物引起反馈再回来的时间差,而光速具有不变性,再将时间差乘以光速便可得到目标物体的距离。
对于TOF的测距原理,如果再加以细分,还可再分为脉冲式及相位式两种。
脉冲式比较简单直接,就是发出一道激光的脉冲,然后再检测激光的相关信息。这个是目前TOF激光雷达采用的主流方式。
相位式则是连续的发射激光。但是接收到的回波信号会由于光速传播的特性,相位上会有差距。当检查相位时就可以转过来处理这个距离。这种方式的优势在于成本相对更低,但其主要问题是测量的速度没法提高。
现下较热的RPLIDAR S1激光雷达便采用了脉冲式TOF测距原理,其配合思岚科技研发的高速激光采集处理机构,能进行每秒9200次的测距动作,在测距过程中,RPLIDAR S1将发射经过调制的红外激光信号,该激光信号在照射到目标物体后产生的反光将被 RPLIDAR S1 的激光采集系统接收,然后经过嵌入在 RPLIDAR S1 内部的DSP处理器实时解算,被照射到的目标物体与 RPLIDAR S1 的距离值以及当前的角度信息将从通讯接口中输出。

基于TOF原理的RPLIDAR S1激光雷达,目前可实现40米的测距距离,同时也是业内体积最小的激光雷达之一,即使在远距离物体条件下,这款TOF激光雷达也能保证测量的精度不发生改变,同时在室外及更大场景中,其性能依旧稳定。
三角测距激光雷达
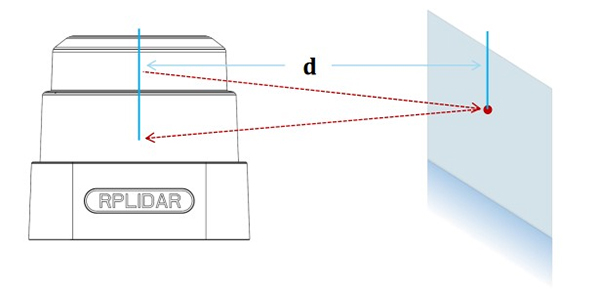
三角测距激光雷达是一种基于图像处理的方法,就像我们给人拍照,人距离相机的远近会决定TA在成像里的大小,这就是三角测距的一种原理应用。像connect体感摄像头,Intel研发的RealSense都会使用到三角测距法,三角测距法采用了一种特制的摄像头,能拍摄出激光的光斑的特性,从而能反推出距离。
相比TOF激光雷达,三角测距激光雷达的成本会有很大降低,本质上来说就是一个摄像头加一个处理芯片。当然三角测距激光雷达也有一些缺点,它会有分辨率的限制,如分辨率不高,物体又较远,可能会出现看不清的情况,同理,三角测距法对于远距离的物体来说,便会看的不是很清楚,所以对算法具有很高挑战。如果算法不够优秀,即使测量四五米开外的物体就会出现问题。

-
研究:激光选区熔化金属3D打印,飞溅与剥蚀的数值模拟2020-08-23
-
《Acta Materialia》:激光选区熔化(3D打印)飞溅与剥蚀的数值模拟2020-08-23
-
日本机器人公司Yukai借力雷达传感器实现智能化创新2020-08-23
-
未来5G+8K最佳载体之一 海信激光电视凭实力占C位2020-08-23
-
微投霸主极米科技 能否在激光电视赛道延续高增长神话?2020-08-23
-
又多了一种免费的激光雷达数据集2020-05-25
-
海信激光电视打造心动电影院,520为爱告白2020-05-21
-
激光雷达的万亿新基建战场:如何才能从聪明的车到智能的路?2020-05-19
-
仙知案例|基于SRC的激光SLAM自动叉车在工厂智能搬运中的应用2020-05-18
-
Libos锂博士激光扫地机器人 科技改变生活2020-05-07
-
标配激光雷达,沃尔沃要在2022年生产自动驾驶量产车2020-05-07
-
Arbe发布首款汽车专用图像雷达处理器芯片解决方案2020-05-06
-
激光称霸高端称王 海信视像年报透露出五大信号2020-05-06
-
缩小激光雷达关键组成部分,让自动驾驶汽车负担得起2020-05-06
-
特斯拉也在研究“伪激光雷达”!2020-04-28