科学家研发出磁驱动高速软体机器人:会行走、悬浮、捉苍蝇
来源:智能网
时间:2020-09-30 22:21:19
热度:75
科学家研发出磁驱动高速软体机器人:会行走、悬浮、捉苍蝇据国内媒体报道,《通讯-材料》最新发表了一篇技术研发成果论文,研究人员已成功研发出一种新型的磁驱动高速软体机器人,这种机器人可
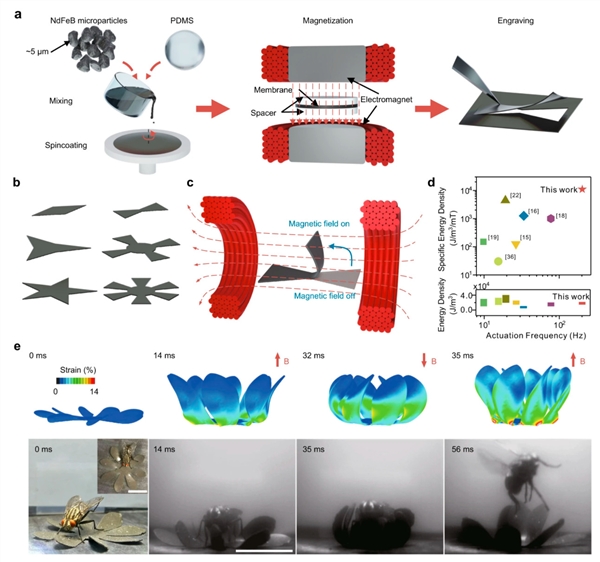
据国内媒体报道,《通讯-材料》最新发表了一篇技术研发成果论文,研究人员已成功研发出一种新型的磁驱动高速软体机器人,这种机器人可以行走、游泳、漂浮和捕捉活体苍蝇。
这种机器人外形如同纸张,可以做到薄如蝉翼。材料内部被嵌入了微小的磁体,无需电力驱动,可以根据磁场变化进行形状、动作的变化。
论文通讯作者Denys Makarov及其团队在论文中展示了磁驱动高速软体机器人的设计原理、材料和制作工艺。
他们在机器人体内嵌入微小的磁体,能快速响应磁场,实现了迄今最高的比能量密度,这对于低磁场下的高速驱动很关键。
在实验示例中,重23mg、厚200um的四臂机器人在3.7mT磁场作用下漂浮;蝠鲼形态的机器人可以在水中运输物品,尺寸为17mmx19mm,厚度80um;一个六臂机器人可以抓取、运输和释放无磁性物体,直径20mm厚度80um。
一个花形机器人在一只苍蝇触发陷阱后捕捉了它,随后张开磁驱动的八臂释放了它,其直径25mm,厚度200um。
-
权威认证 | 旺龙机器人乘梯智能控制系统通过广东省特种设备检测认证2020-09-30
-
移动机器人最新市场报告:今年的收入预计将达到24亿美元2020-09-30
-
移动充电宝?爱驰汽车研发会自动找车充电的机器人2020-09-30
-
智能电网机器人上岗 独立进行带电作业2020-09-30
-
日本1比1还原高达机器人:高18米、重25吨!2020-09-30
-
国防机器人中的精密微电机2020-09-30
-
易造机器人运用思念食品生产,助力食品加工行业智能化转型2020-09-30
-
ABB机器人数据类型的秘密32020-09-30
-
OnRobot推出机器人砂光系统2020-09-30
-
2020中国企业500强榜单发布:仅有碧桂园、格力等6家造机器人2020-09-30
-
京东健康累计服务超1.5亿用户,其成长驱动力是什么?2020-09-30
-
ABB机器人数据类型的秘密42020-09-30
-
智能电网机器人上岗,城市电网更安全可靠2020-09-30
-
工业机器人这五方面知识和技术你一定要了解!2020-09-22
-
机器人等离子切割是否要取代手动等离子切割?2020-09-22