多轴机械手运动控制系统CRT-DMC660MF简易说明
多轴机械手运动控制系统CRT-DMC660MF简易说明CRT-DMC660MF 示教系统简易说明1. 系统构成1.1 DMC660M 6 轴运动控制器自主研发的新型多轴运动控制系统
CRT-DMC660MF 示教系统简易说明
1. 系统构成

1.1 DMC660M 6 轴运动控制器
自主研发的新型多轴运动控制系统应用平台;
支持标准 Modbus 协议;
六轴步进电机、伺服电机控制;
自带输入输出:全部光电隔离,输出端口>500mA/24V,直接驱动 24V 电磁阀;
内嵌主机通讯接口,可灵活扩展:IO、AD、DA、PWM、手轮等;
512 个文件保存;
1.2 Leader30ST 示教编程器
自主研发的手持终端;
壳体定制开模:高端 3D 设计、防摔、防磨损;
3.5 寸真彩屏(320x240);
按键输入:手感好,寿命长,易维护;
状态指示灯:电源指示、通讯状态指示;
主机接口:高速串口(波特率:195200);
1.3 通讯线及其他附件
系统包含通讯线、接线端子等,扩展附件需另行配置。
2. 功能特点
2.1. 操作权限管理
系统有效操作前需用户登录,系统设置多层用户级别,最大可能保证设备安全。
2.2. 工艺文件编辑
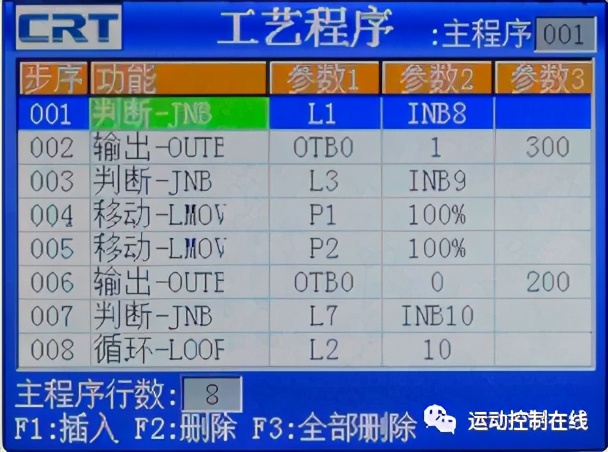
工艺文件与坐标信息采集采用分离式设计 工艺文件除实现电机运动控制:多轴直线插补、圆弧插补、圆弧与插补联动外,更可进行复杂的逻辑及运算功能。
2.3. 坐标信息采集

坐标采集支持绝对坐标、相对坐标的数据处理。
2.4. 运行模式
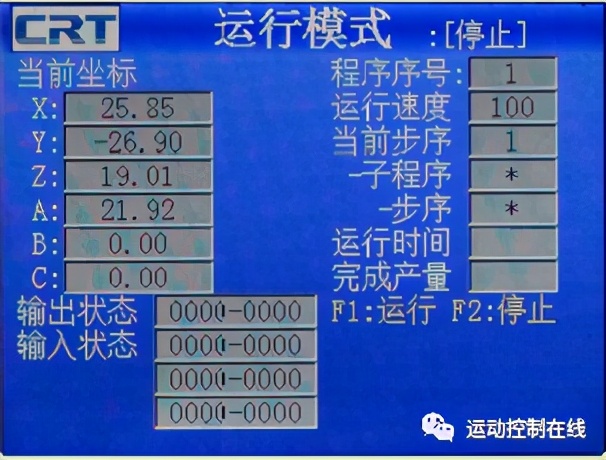
运行模式下,实时监控电机、输入、输出状态;实时显示工艺程序运行位置。
2.5. 电机/轴参数设定
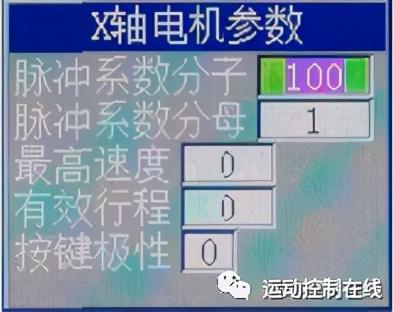
六个电机/轴各采用独立的参数设置,灵活适用各种应用场合;脉冲系数采用分子、分母双参数设定,最大可能提高系统精度;手动按键方向可调换,适配不同行业应用习惯。
2.6. 手动操作

按键操作灵活、精准;坐标显示、IO 状态显示实时高效。
2.7. 文件管理
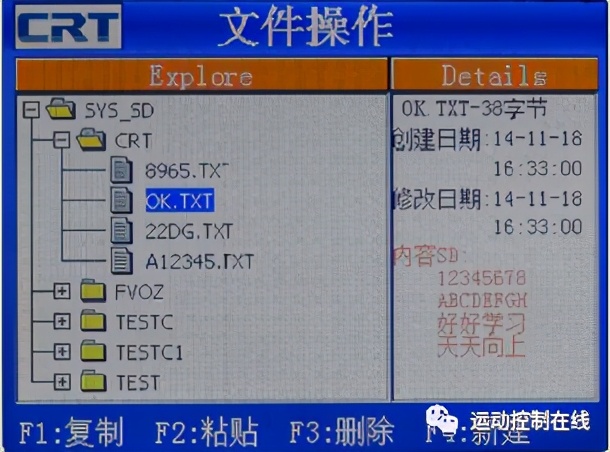
系统内部配置 SD 卡,USB 接口可插入 U 盘;灵活实现文件/数据导入及导出保存、多台设备间设备拷贝;SD 卡+控制器多文件保存,实现无限多种类的产品数据加工。
2.8. 分期密码设定
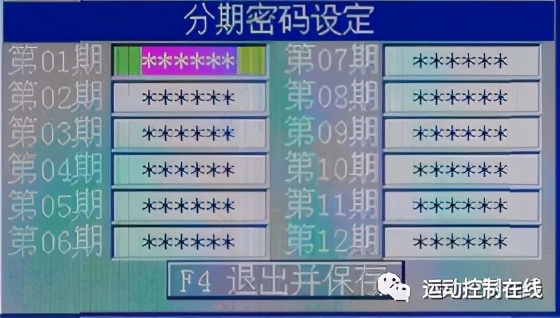
系统内嵌 12 期分期密码设定及管理,密码仅设备厂商可设置,支持 12 期设备分期付款;到期未解锁,系统自动锁机,最大程度保护设备厂商的有效权益。
2.9. 功能扩展
可根据具体需求,灵活搭配扩展附件:输入输出扩展、AD、DA、PWM、手轮等。3. 应用范围
3~6 轴高性能机械手应用:多轴自动焊接,多轴搬运机械手。
4. 电气规格
开关量输入:
输入电压:5~30V;高电压>4.5V;低电压<1.0V;
通道:24,全部光电隔离,隔离电压:2500V DC。
脉冲输出:
通道:5 脉冲+5 方向,全部光电隔离;
输出类型:24V 输出,内含 1.0K 限流电阻,直接接 5V 驱动器;
实际最高脉冲频率:200Hz/轴。
开关量输出:
通道:8,全部光电隔离;
输出类型:NPN 集电极开路输出,最大峰值电流 3000mA,最大持续电流 500mA。
应用环境:
电源要求:20~28V DC(50W);
功耗:< 4W;
工作温度: 0~60 摄氏度;工作湿度: 20%~95%;
储存温度:-20~80 摄氏度;储存湿度: 0%~95%。
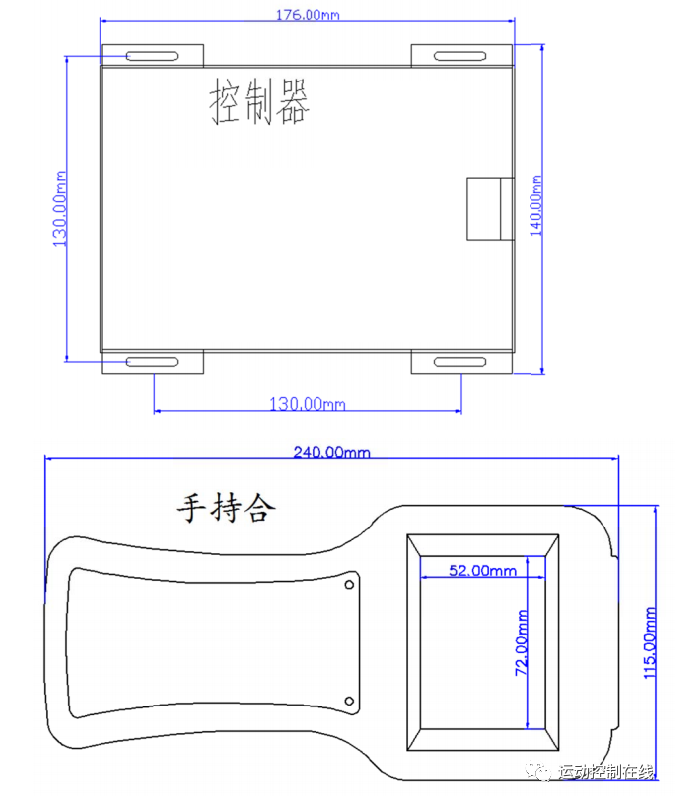
5. 外型及安装尺寸
专业提供工业自动化运动控制技术及解决方案!
---焊接、抛光、桁架机械手、等特种数控设备运动控制系统。
-
传承福克斯运动基因,长安福特全新推出福克斯瓦罐车型2020-11-11
-
原来这类人在秋冬季节运动还有这些讲究?2020-11-10
-
运动手环是怎样实现有效的防水防尘的?2020-11-06
-
智能手表新风云:独立联网+运动健康功能2020-11-02
-
699元!小米手表Color运动版支持117种运动模式2020-10-25
-
649元!小米手表Color运动版首发:支持血氧+117种运动模式2020-10-21
-
智能运动服,运动更智能2020-09-30
-
权威认证 | 旺龙机器人乘梯智能控制系统通过广东省特种设备检测认证2020-09-30
-
荣耀手表GS Pro评测体验:上百种运动模式 上山下海不断电!2020-09-17
-
图赏:荣耀首款智能户外运动手表2020-09-16
-
欧尚X5能否激活运动SUV市场2020-09-15
-
试驾名爵6插电混动:外形运动,机械自动2020-09-15
-
专注于电机运动控制类芯片,凌鸥创芯完成数千万元A+轮融资原创2020-09-15
-
华米Amazfit Neo评测:健康运动全能打!2020-09-15
-
运动气息强烈!溜背式全新轿跑 SUV奔驰GLE来咯2020-09-13