揭秘四维图新高精度地图的生产过程
揭秘四维图新高精度地图的生产过程本文来源:智车科技/ 导读 /高精度地图想要最终真正在自动驾驶场景中得以落地,仍然有很多亟待解决的充分必要条件:比如如何达到还原现实世界的精度?如何
本文来源:智车科技
/ 导读 /
高精度地图想要最终真正在自动驾驶场景中得以落地,仍然有很多亟待解决的充分必要条件:比如如何达到还原现实世界的精度?如何更高效的与自动驾驶系统沟通?如何保证更新频率和响应速度?这些问题越早解决,自动驾驶车辆就越早的走进我们的生活。
本篇内容,就和大家一起探讨一下,究竟如何定义高精度地图的生产模式,以及在线服务模式,才能让未来的地图更新做到真正的“行云流水”!



揭秘高精度地图的生产过程
与传统地图不同,高精度地图对精度及鲜度要求极高,因此采集和制作方式也有很大的不同,为了保证地图鲜度,整个生产过程中也会不断地将AI技术应用其中。
究其整个过程可以分为四个阶段:1.采集2.处理3.验证4.发布
采集
高精度地图的采集目前行业主流两种方式:专业采集车进行外业采集,以及UGC设备采集。首先,为了保证数据的质量和精度,会提前分配任务给专业的高精度地图采集车,采集车会预先安装好多种传感器,如激光雷达、摄像头、惯性测量单元和定位设备等,四维图新目前的方案就是配置32线激光雷达,6向摄像头以及自研时空同步与电流控制系统,以保证可以采集到厘米级精度的数据。
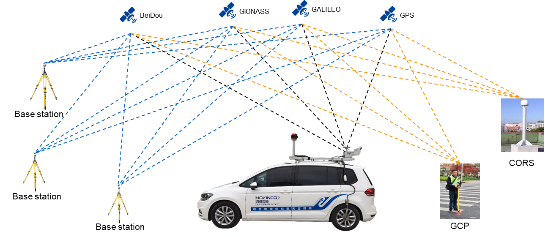
图为:四维图新高精度地图采集车
但是,由于专业采集设备较为昂贵,在成本有限的情况下无法做到无限制扩张。为了更高效地生产全区域覆盖的高精度地图,通常还会通过UGC的方式采集大量数据,从而精准地发现数据变化的范围,再根据有效信息判断是否需要采集车进行有针对性的专业测量。

图为:四维图新高精度地图更新验证部分过程
处理
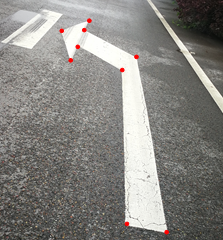
我们将所有采集到的地图数据称为原始数据,这些数据想要成为地图,还需经过整理、分类与清洗等的专业处理过程。这个环节是十分繁琐的,需要把不同传感器的采集数据进行融合叠加,并进行道路标线、路沿、路牌、交通标志等道路元素的识别,对于一些冗余数据在这一环节也会进行自动整合和删除。如此繁琐的过程,为了保证处理效率和准确性,我们通常主要依靠程序来自动化完成,这对程序算法能力的要求就非常之高了。

图为:四维图新软件自动化识别噪点、跳变,降噪、提高精度

图为:四维图新自研算法,可自动提取超过60种要素

图为:四维图新自动化处理地图部分过程示意
验证
经过一系列完整的自动化处理过程后,为了确保程序处理的有效性,还会由专业的技术团队进行人工抽样检测,并进行最后一步确认和完善从而发现出自动化处理过程中出现的错误,及时弥补数据的缺陷,提高精准度。



图为:四维图新从外业到内业的全面检测过程

图为:四维图新自动化结合人工结果验证示意
发布
验证无误的地图,需要进行转换编译,生成矢量母库,从而完成生产环节。
但由于高精度地图体量非常大,超过GB级的存储量已经不是传统物理存储可以承载。此外高精度地图对数据更新的实时性要求非常高,这就决定了高精度地图需要借助云平台来实现发布及更新。

影响高精度地图量产的关键因素
其实对于大部分拥有测绘资质的传统图商而言,高精度地图虽然相较传统地图难度及成本有所增加,但单纯生产出来只是时间问题,然而从采集制作到真正量产,过程中会面临更多的问题和挑战:
实时更新问题
传统导航电子地图的更新频率为静态数据(通常更新频率为季度更新或月更新),准静态数据(频率为日更新)。
而高精度地图对数据的实时性要求较高,更新频率通常为准动态数据(频率为分钟更新),实时动态数据(频率为秒或毫秒更新)。

图为:区域动态地图分层说明
如何在自动驾驶车辆行驶中完成高频率的地图在线更新,也是高精地图量产应用最关键和最难解决的问题。
生产效率问题
与传统车载电子地图相比,高精地图精细程度更高,动态要素更为丰富,传统地图的生产方式难以满足其量产应用的需求。
目前,厘米级地图对测绘效率要求非常高,导致需要布设很多高精度采集设备和车辆,相应的成本也会非常高。较高的成本也在一定程度上,限制了高精地图的生产效率。
地图存储问题
车载地图的体积受到嵌入式系统的存储容量限制。目前,自动驾驶用高精度地图(厘米级),存储密度非常高,整体容量已远远超出目前主流控制器方案的存储容量,所以需要借助云储存及云分发的形式才能得以实现。

未来高精度地图更新生态圈
高精度地图完成采集生产环节,并不意味着高精度地图生产完结已经可以量产,这恰恰只是地图更新闭环的开始。想要高精度地图真正得以使用并最终服务于自动驾驶,我们也需要一个完整的生态圈闭环。
未来的高精度地图更新,一定是一个云+端的完整生态圈,在这个生态圈里,包含了高精度地图的采集、生产、应用、以及更新。
而未来智能网联汽车,将成为这个生态圈里一个重要的环节,它既是云端地图数据成果的消费和使用者,同时也会是地图云中心部分数据的提供者。
一方面,车辆在行驶过程中实时的接收来自云端分发的高鲜度高精度地图,用于辅助自动驾驶;
而另一方面,车端也会将自己实时位置、车身姿态、驾驶行为、各类传感器数据等回传给云端。同时云端还会通过V2X技术,收集到来自路侧设备回传的实时交通数据。云中心对这些实时数据进行深度挖掘分析,从而对高精度地图进行进一步有效更新,再将更新的内容通过OTA等形式下发到车端。
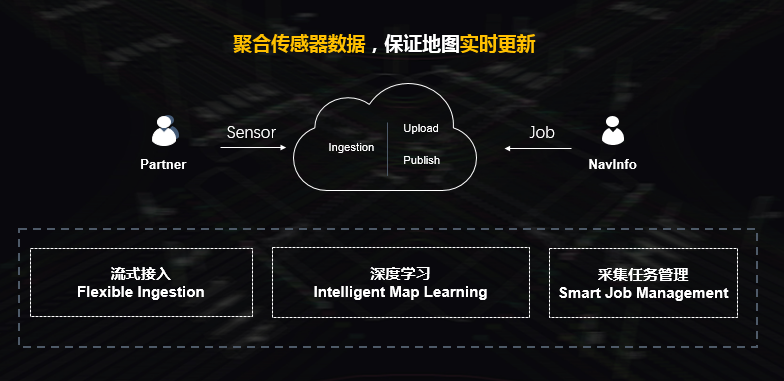
如此循环反复,一边不断对高精度地图进行实时更新优化,另一边形成一套智能网联汽车体系下高精度地图生产运营一体化的完整生态圈。

面向量产四维图新的挑战与思考
通过提早的业务布局和全流程算法的加持,目前四维图新已经完成了全国范围超过32万公里高速公路的高精度地图覆盖,以及超过5000公里复杂城市道路的覆盖,在国内属于领先水平。
而面向高精度地图量产及实时更新,四维图新也正在构建一个云+端的生态体系,在数据生产之外,独立出一个专门用于自动驾驶的云服务平台——HDMS(HighDefinition Map Service)。未来借助平台来支撑地图的流式分发和UGC实时更新。

此外,当自动驾驶真正走向量产,客户需要的远不仅仅是高精度地图,未来会有更多源的第三方数据关联到地图上,从而产生服务。因此我们认为只有借助云平台不断实现行云流水的地图更新过程,高精度地图才能得以真正服务于自动驾驶相关服务,从而与用户实现共同获益,共同成长。
-
华米Amazfit GTR2、GTS2如约更新90种运动模式,自动运动识别更智能2020-12-01
-
美版Galaxy Watch Active 2最新更新:新增多个功能2020-11-29
-
滴滴地图背后,滴滴有何更深的图谋?2020-11-28
-
可穿戴新式研究技术,可绘制婴儿大脑地图2020-11-28
-
电子地图“神仙打架”:百度与四维图新谁能胜出?2020-11-23
-
腾讯地图正式加入ToB大家庭,推出面向产业版的地图We Map2020-11-18
-
腾讯郭殿升:腾讯WeMap推动数字地图技术创新升级2020-11-13
-
高德地图发布智慧交通物联网平台 涵盖智慧锥桶等系列IoT硬件2020-11-09
-
新专利:安装在挡风玻璃后的激光雷达,提供实时3D地图2020-11-08
-
多方力量参与高精度地图领域,谁更有优势?2020-11-06
-
苹果macOS Catalina 10.15.7更新 改进macOS安全性2020-11-06
-
FreeBuds Pro重磅更新:支持20Hz到20 KHz频段声音2020-10-23
-
大疆很快会更新一款便携式航拍无人机:御Mavic Mini 2。2020-10-23
-
小鹏P7自动驾驶与智能交互重大更新,体验再升级2020-10-22
-
马斯克确定测试版将本月更新!特斯拉有望年底实现全自动驾驶2020-10-22