6种工业机器人主体结构的基本形式,你认识几种?
6种工业机器人主体结构的基本形式,你认识几种?工业机器人的机械系统一般由一系列连杆、关节或其他形式的运动副所组成。机械系统通常包括机座、立柱、腰关节、臂关节、腕关节和手爪等,构成一
工业机器人的机械系统一般由一系列连杆、关节或其他形式的运动副所组成。机械系统通常包括机座、立柱、腰关节、臂关节、腕关节和手爪等,构成一个多自由度的机械系统。
手臂一般由上臂、下臂和手腕组成。末端执行器是直接装在手腕上的一个重要部 件,它可以是两手指或多手指的手爪,也可以是喷漆枪、焊枪等作业工具。
工业机器人主体结构中各个关节运动副和连杆构件组成了不同的坐标形式。常见的主体结构形式有:直角坐标形式、圆柱坐标形式、球面坐标形式、关节坐标形式、并联机器人、物流机器人等。
1、直角坐标机器人
直角坐标机器人是指在工业应用中,能够实现自动控制的、可重复编程的、运动自由度仅包含三维空间正交平移的自动化设备。其组成部分包含直线运动轴、运动轴的驱动系统、控制系统、终端设备。可在多领域进行应用,有超大行程、组合能力强等优点。
机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。
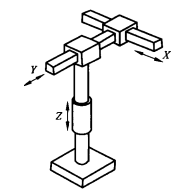
直角坐标形式机器人
一个典型的3D直角坐标机器人,它由X轴,Y轴,Z轴及驱动电机组成。直角坐标机器人优点主要有:
①任意组合成各种样式:每根直线运动轴最长是 6 m,其带载能力从10kg到200k g。在实际应用中已有近百种结构 的直 角坐标 机器人,这些结构也可以任意组合成新的结构等。
②超大行程:因为单根龙门式直线运动单元的长度是6 m,还可以多根方便地级连成超大行程,所以其工作空间几乎没有限制,小到手机点胶机,大到1 8 m长行程的切割机超大行程时要采用直线导轨和齿条传动方式。
③负载能力强:单根直线运 动单元的负载通常小于200k g。但当采用双滑块或多滑块刚性联结时负载能力可以增加5 到1 0 倍当把两根或四根直线运动单元并排接起来使用时,其负载可以增加2到4倍。当采用多根多滑块结构时其负载能力可增加到数吨。
④高动态特性:轻负载时其最大运行速度可达到 s m /s,加速度可达到4m/s2。使其具有很高的动态特性,工作效 率非常高,通常在几秒内完成一个工作节拍。
⑤高精度:按传动方式及配置在整个行程内其重复定位精度可达到0.05mm到0.01mm。
⑥扩展能力强:可以方便改变结构或通过编程来适合新的应用。
⑦简单经济:对比关节机器人,直角坐标机器人不仅外观直观且构造成本低,编程简单类同数控铣床,易培训员工和维修,使其具有非常好的经济性。
⑧寿命长:直角坐标机器人的维护通常就是周期性加注 润滑油,寿命一般是10年以上,维护好了可达20年。
2、圆柱坐标形式机器人
圆柱坐标形式机器人包括上下圆盘的旋转台相对于包括上下固定板的框架旋转。丝杠和导杆安装在上下圆盘上。第一螺母总成安装到丝杠。第二螺母安装到导杆,第一螺母总成和第二螺母安装在移动件上。轴结构包括:具有纵向空腔的内轴,外轴和一中间轴,它们与内轴同心并可分开地旋转。设有一对臂驱动轴的臂支撑框架安装在轴结构上。设有第一、第二和第三驱动装置,相对于框架旋转旋转台,相对于旋转台旋转丝杠,并相对于旋转台旋转各轴。
如下图所示,机器人以θ、z和r为参数构成坐标系。手腕参考点的位置可表示为P=f(θ,z,r)。其中,r是手臂的径向长度,θ是手臂绕水平轴的角位移,z是在垂直轴上的高度。如果r不变,操作臂的运动将形成一个圆柱表面,空间定位比较直观。操作臂收回后,其后端可能与工作空间内的其他物体相碰,移动关节不易防护。
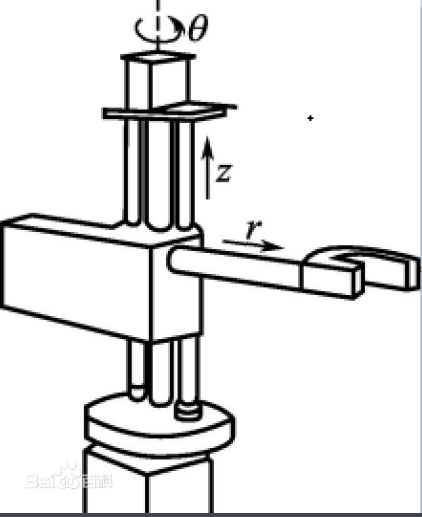
圆柱坐标机器人
3、球面坐标机器人
这种机器人像坦克的炮塔一样。机械手能够做里外伸缩移动、在垂直平面内摆动以及绕底座在水平面内转动。因此,这种机器人的工作空间形成球面的一部分,称为球面坐标机器人;其设计和控制系统比较复杂,美国Unimation公司的Unimation系列机器人就是球面坐标形式的代表。
三自由度球型坐标机器人可实现:手臂俯仰、手臂回转、手腕伸缩。 机器人采用电机驱动,初步估计要用到3个不同型号的电机,手臂俯仰电机,带谐波减速;手臂回转电机,带谐波减速;手腕伸缩电机,与滚珠丝杠直连。末端负载5-10Kg,转动副±45°,移动副300-400mm,末端最大移动速度1m/s。
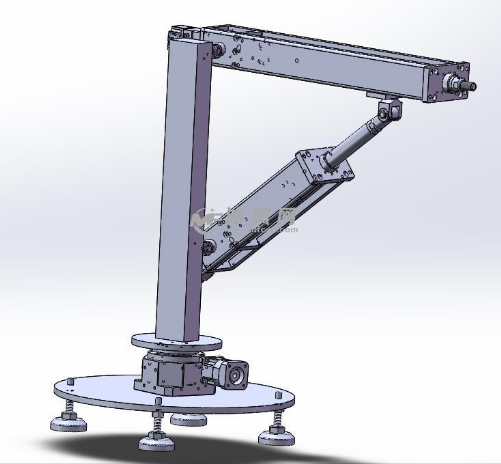
球坐标型3自由度工业机器人
4、关节坐标形式机器人
关节坐标形式机器人主要由底座、大臂和小臂组成。大臂和小臂间的转动关节称为肘关节,大臂和底座间的转动关节称为肩关节。底座可以绕垂直轴线转动,称为腰关节。它是一种广泛应用的拟人化机器人,其特点主要有:
(1)有很高的自由度,灵活性,从不同角度不同方位来工作;
(2)速度可达6米/秒,加速度10米/每秒;工作效率高;
(3)经常在网络或电视里看到,较为世人所熟悉和接受;
(4)6轴机器人主要应用于汽车点焊,弧焊,装配(拧螺丝),检测类这些轻巧类工作;
(6)人们开发了4轴搬运码垛类机器人。
关节坐标形式机器人主要有以下优点:
(1)结构紧凑,占地面积小。
(2)灵活性好,手部到达位置好,具有较好的避障性能。
(3)没有移动关节,关节密封性能好,摩擦小,惯量小。
(4)关节驱动力小,能耗较低。
关节坐标形式机器人的缺点有:
(1)运动过程中存在平衡问题,控制存在耦合。
(2)当大臂和小臂舒展开时,机器人结构刚度较低。
5、并联机器人
并联机器人,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。

并联机器人(来源:维科网)
并联机器人的特点呈现为无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好。其主要优势有:
(1)无累积误差,精度较高;
(2)驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;
(3)结构紧凑,刚度高,承载能力大;
(4)完全对称的并联机构具有较好的各向同性;
(5)工作空间较小;
根据这些特点,并联机器人在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用。
6、物流机器人
采用自动或人工方式装卸货物,按设定的路线自动行驶或牵引着载货台车至指定地点,再用自动或人工方式装卸货物的机器人。
物流机器人主要应用于仓库、分拣中心、以及运输途中等场景的,用以完成装卸、搬运、存储、分拣和运输等相关工作。

叉车AGV(来源:维科网)
物流机器人从工作类别上大概可以分成三类:
(1)无人搬运车
简称AGV小车,它是一种高性能的运输智能设备,主要应用于货物的搬运和移动,早已广泛应用于各个行业;AGV小车的自动化程度高,操作方便;当车间某一个环节需要某个辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由专业的技术人员向计算机发出指令,在电控设备的合作下,这一指令最终被AGV接受并执行——将辅料送至相应地点。
(2)码垛机器人
能够替代人工进行货物分类、搬运和装卸,特别是代替人类搬运危险物品,像放射性物质、有毒物质等,保证职工的生命安全。实现自动化、智能化、无人化。码垛机器人除了可以替代人去搬运危险物品之外,效率还远高于人工工作,所以,使用码垛机器人实现自动化生产是推动企业发展的有效手段。
(3)分拣机器人
是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货物分拣。它通过传感器、物镜、图象识别系统和多功能机械臂等设备,根据图象识别系统来识别物品的形状样子,机械手抓取物品,放到指定位置,通过这些设备实现货物快速分拣,分拣物品是整个物流环节中较复杂的环节,往往耗时耗力。而自动分拣机器人能够实现24小时不断分拣;占地面积小,分拣效率高,可降低70%人工成本;精准、高效,提高工作效率,减少运输成本。
上一篇:工业机器人的驱动系统分类及特点
-
工业机器人的驱动系统分类及特点2020-12-29
-
机器人控制系统功能及构成详解2020-12-29
-
4种工业机器人控制方式解析2020-12-29
-
工业机器人末端执行器分类2020-12-29
-
2020年中国机器人行业融资242起,融资额达267.7亿元2020-12-28
-
炎性关节炎患者将面临更高的阿尔茨海默病风险2020-12-28
-
机器人不坏金身的“终结者”——液态金属控制技术2020-12-28
-
劢微机器人 | 客户为先,差异化技术紧贴核心诉求,赋能企业场内物流智慧升级2020-12-25
-
大象机器人与指南车达成战略合作2020-12-25
-
梅卡曼德专访:工业机器人智能化变迁下的厚积薄发2020-12-25
-
协作机器人在2020年的3大标签2020-12-24
-
服务机器人的分类及市场规模2020-12-23
-
全球首台全自动洗车机器人下线,又是中国制造2020-12-23
-
未来机器人联手汽车饰件生产企业,打造整仓无人搬运智慧工厂2020-12-23
-
扫地机器人哪个牌子好?为什么“智能”属性那么重要2020-12-22