车用传感器:雷达、LiDAR和摄像头孰优孰劣?
车用传感器:雷达、LiDAR和摄像头孰优孰劣?立体视觉处理是将世界从2D平面转换为全3D环境,不仅提供了更丰富、更密集的目标场景表示,还允许感测系统在未经训练的情况下识别一般障碍物
立体视觉处理是将世界从2D平面转换为全3D环境,不仅提供了更丰富、更密集的目标场景表示,还允许感测系统在未经训练的情况下识别一般障碍物,使仓库机器人、自动驾驶车辆等的导航更安全、更有效。
文︱立厷
激光雷达(LiDAR)的竞争者来了,本不是什么颠覆性技术,但分辨率提升15倍,成本却与便宜的固态LiDAR相仿;埃隆·马斯克为其点赞,特斯拉也开始搭载,不过好像还没有玩转。要说真正量产搭载的还是传统意义上的豪车:奔驰S级和E级、宝马7系和5系、雷克萨斯LS、路虎Discovery Sport SUV、捷豹XFL、XE等。
从特斯拉的摄像头说起
特斯拉的全电动汽车以摄像头数量多而闻名,其8个摄像头主要用于岗哨模式(Sentry Mode),还有一个TeslaCam用作行车记录仪。通常人们没有注意的是,特斯拉在Model 3和Model Y中配备了第九个摄像头,就在后视镜上方,用来监测车内情况。
前不久,美国的Model 3车主Erik Martin曾见过一辆路测的Semi原型卡车,说它配备了26个摄像头。事实上,量产版Semi车型最多也就配备10个摄像头。
早在2016年,在Model S上测试的特斯拉Autopilot 2.0(AP)硬件就“在驾驶员侧安装了某种双目摄像头,看起来像一副小望远镜。”
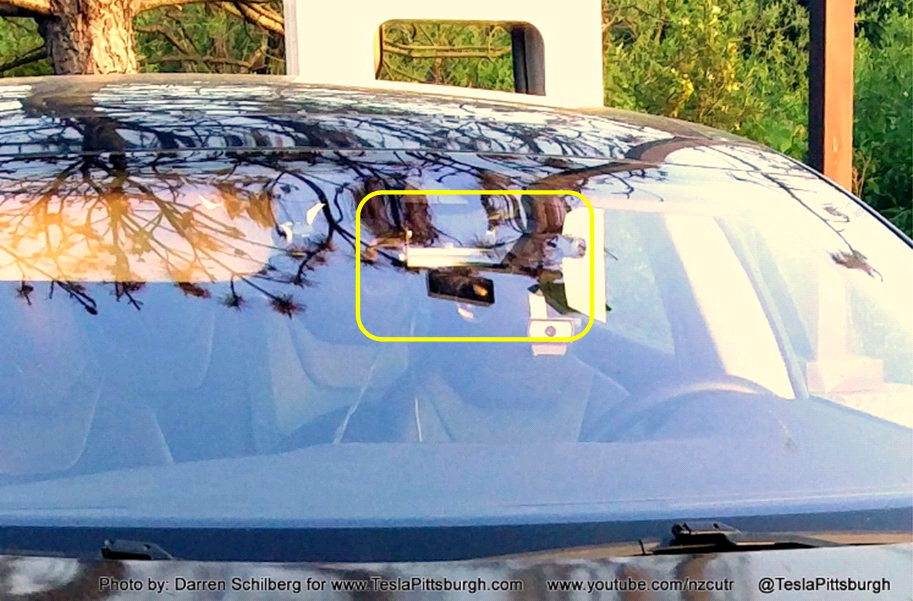
特斯拉测试的双目摄像头
值得注意的是,特斯拉Model 3前视已搭载三个基于安森美半导体CMOS图像传感器的三目摄像头(鱼眼、中焦和长焦)模块,用三个不同焦距摄像头覆盖不同范围场景,以解决摄像头无法来回切换焦距的问题,通过立体视觉技术实现3D成像。
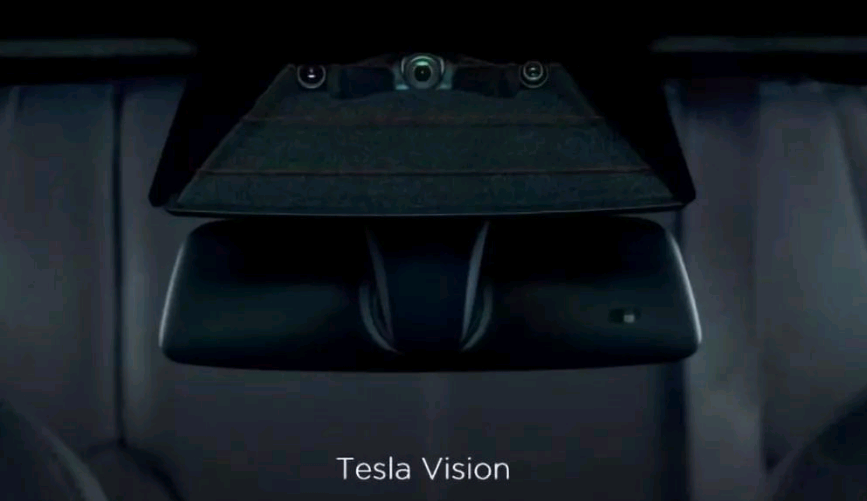
特斯拉的三目摄像头模块
提供各类立体视觉解决方案的北京中科慧眼销售总监崔凯表示:“对于高级辅助驾驶系统(ADAS)单目就够用,还便宜,而自动驾驶更需要多传感器融合。单目有一种配置叫三目,即单种焦距的单目,可以实现近距离宽视角和远距离的全覆盖。但如果是三焦双目就有很高的算力要求,开发难度很大。”
这话在特斯拉身上得到了应验,根据国外车友测试,发现搭载Autopilot 2.5硬件的Model 3,在开启AP后,前置三目摄像头中只有一个主摄像头在工作,而长焦和鱼眼摄像头都处于关闭状态。
另外,去年年初国产特斯拉被暗中减配,混装了HW2.5和HW3.0,后者是特斯拉自己专门为FSD打造的新计算平台,据称其图像处理能力是HW2.5的21倍,计算能力提升了大约7倍。但特斯拉中国却表示:现阶段如果没有选装FSD功能,使用HW2.5的Model 3车型与HW3.0的Model 3车型在驾乘体验和使用安全上“基本不存在区别”。由此可见,现在的三目摄像头还是受制于算力。
的确有车主发现,行车记录仪拍下来的视频中,除了正前方的视频较为清晰外,其他角度的视频都比较模糊。原因就在于HW2.5(自动驾驶芯片)硬件算力不足,只有前置主摄像头支持全分辨率输出,剩下的5个摄像头全部降低了分辨率输出。这样,想要实现对侧前方、后方大量车辆的识别非常难。这也AP在面对侧前方车辆加塞并线时反应没有那么灵敏的一个原因。

特斯拉的中焦实景
如果真是那样,特斯拉的视觉还是2D的,想象一下八个摄像头同时处理要消耗多少GPU资源。结果可想而知,还而知了不少。
有专业人士分析说,特斯拉方案的问题在于,其方案主要依靠视觉,所以环境感知3D重建是基于2D的。2D转换为3D,必然要丢失信息。通过看实际视频,发现特斯拉对远处物体有误识别的情况,特别是有穿着黑衣服的行人在晚上突然过马路时。毫米波雷达不是看人的,超声波距离不够,视觉两眼一抹黑,这不就是视觉欺骗吗?
3 首页 下一页 上一页 尾页-
人工智能视觉算法商城「极视角」完成C1轮融资2021-01-19
-
特斯拉频繁降价,蔚来、小鹏、理想等车企该如何去应对?2021-01-18
-
特斯拉最具竞争力的对手百度来了!2021-01-12
-
复盘支撑特斯拉疯狂降价16万背后的6家机器人供应商2021-01-11
-
百度官宣联合吉利造车,下一个特斯拉要来了!2021-01-11
-
特斯拉最强劲敌或来自中国!2021-01-08
-
特斯拉降价幅度底线有多大2021-01-07
-
风头正劲特斯拉频遭揭短 事实究竟何如?2021-01-07
-
特斯拉Model Y跟蔚来EC6如何选择?2021-01-07
-
人民需要特斯拉,但条件不允许2021-01-07
-
开年狂降15万的特斯拉有什么目标?2021-01-06
-
特斯拉连续降价过后最先顶不住的是宝马!2021-01-06
-
全球最大特斯拉超级充电站上线落户上海2021-01-06
-
特斯拉又降价,对SUV市场的精准把握!2021-01-05
-
电动汽车消费“唯特斯拉论”不可!2021-01-05