仙知小课堂|可视化操作软件Roboshop操作指南——机器人标定
仙知小课堂|可视化操作软件Roboshop操作指南——机器人标定Roboshop作为仙知机器人自主研发的移动机器人一站式实施工具,软件集成了机器人控制,地图构建及编辑,机器人建模等
Roboshop作为仙知机器人自主研发的移动机器人一站式实施工具,软件集成了机器人控制,地图构建及编辑,机器人建模等移动机器人应用中常用的功能,旨在为用户提供快速、准确、稳定 的移动机器人解决方案。为方便用户使用,继之前介绍了地图构建、重定位与路径导航等功能,本期重点介绍机器人标定功能:
机器人标定功能用于矫正机器人行走精度。本部分内容将从如何判断机器人是否标定与机器人标定功能两个方面进行介绍:
如何判断机器人是否标定
打开Roboshop,通过查看【首页】中【机器人标签】右上角的标定图标判断该机器人是否已标定。
未标定 的机器人标签如下图所示:
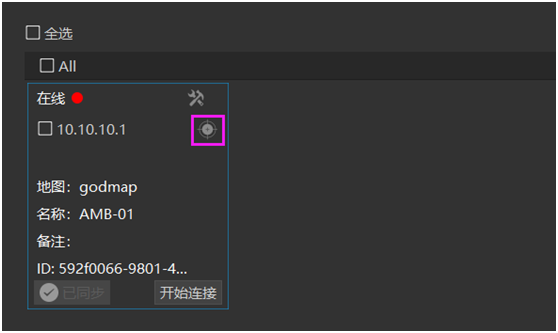
已标定 的机器人标签如下图所示:

机器人标定功能
机器人标定界面分为:【标定外参】、【标定运动能力】、【标定IMU偏摆角系数】和【其他】四个模块,如下:

一、标定外参
【标定外参】界面如下图所示:

标定外参使用方法:(在使用该项标定作业前需要确认机器人的位置必须准确)
(1)使用【地图编辑】在【工具栏】选择【图元】工具,选择对应的底盘图元进行添加,这里以差动车为例:

(2)添加到正确的区域后,点击【退出编辑】,选择【推送地图】使得地图同步:

(3)在模块工具栏中选择【其他】里的【机器人标定】,点击【标定外参】中的【开始标定】:

(4)等待重新定位和标定参数自动清零成功后,等待右侧输出区域提示:[ 请控制机器人移动和旋转,或执行机器人标定任务链 ]后:

(5)点击【执行标定任务链】开始进行自主标定,期间不需要任何操作:

(6)等待机器人完成所有导航后,点击【停止标定】,在下方的输出区域查看所得到的标定参数达到预期要求:

(7)点击【设置标定数据】,等待数据写入成功后即可完成该项标定操作:

注:如果所得到的标定参数未达到预期要求,请勿【设置标定数据】,按照之前的步骤重新进行该项标定操作;
【标定数据清零】:手动清除机器人中已经存在的 【外参数据】,一般只在调试时使用此功能,实际使用中无需点击该按钮。
二、标定运动能力
【标定运动能力】界面如下所示,该功能分为【一般用途】和【单舵轮】两个模块:

其中,单舵轮机器人需要分别标定【一般用途】和【单舵轮】模块,差动机器人只需标定【一般用途】模块即可。
一般用途标定的使用方法:
【一般用途】模块分为【最大速度/加速度标定】和【最小可执行速度标定】。
最大速度/加速度标定:
该作业会使得机器人进行高速旋转。请远离机器人自转区域,请勿使用网线连接机器人进行该操作。
(1)点击【开始标定】,确保已为机器人留够了充足的旋转空间,在弹出的提示框中点击【确定】按钮。

(2)等待重新定位和标定参数自动清零成功后,机器人开始标定工作。

(3)等待标定任务完成,点击【获取标定结果】查看下方的输出区域,所得到的标定参数达到预期要求。

(4)点击【设置标定数据】,等待数据写入成功后即可完成该项标定操作。

如果所得到的标定参数未达到预期要求,请勿【设置标定数据】,按照之前的步骤重新进行该项标定操作。
【标定数据清零】:手动清除机器人中已经存在的 【最大速度/加速度标定数据】,一般只在调试时使用此功能,实际使用中无需点击该按钮。
最小可执行速度标定:
使用方法与【最大速度/加速度标定】相同。
单舵轮标定的使用方法:
该标定只适用于单舵轮机器人标定时使用,分为【舵轮响应延时标定】和【舵角死区标定】;使用方法与【最大速度/加速度标定】相同。
三、标定IMU偏摆角系数
使用方法与【标定运动能力】中【一般用途】的【最大速度/加速度标定】相同。
【标定数据清零】:手动清除机器人中已经存在的 【IMU偏摆角系数标定数据】,一般只在调试时使用此功能,实际使用中无需点击该按钮。
四、其他
【其他】模块中的按钮功能适用于全局标定数据的操作,其界面如下图所示:

其中:
①清除所有标定数据:手动将机器人中已有的标定数据清零(gyroLSB 项的数据会置为默认值,其他数据均会清零)。
②设置为已标定:将机器人设置为已标定状态,此时【首页】中【机器人列表】的相应【机器人标签】的右上角【标定图标】显示为高亮状态。
③设置为未标定:将机器人设置为未标定状态。此时【首页】中【机器人列表】的相应【机器人标签】的右上角【标定图标】显示为置灰状态。
④查询所有已标定数据:获取机器人所有的已标定的数据,并显示在 ⑤【标定数据显示区域】中。
⑤标定数据显示区域:显示标定过程中的相关操作记录,或者显示查询到的所有已标定数据。
注:用于外参标定的图元暂不支持旋转
1.本功能为实验室功能,仅对授权的客户以及在技术协议中注明的机器人型号提供技术支持,我司对本功能保留所有解释权。
2.使用本功能需要确保机器人地图与软件地图数据保持一致。
3.所添加的【标定图元】模块中的站点和线路属性不需要做任何修改。
4.使用本功能需要确保机器人定位准确,机器人无负载,地面环境平坦。
5.[标定外参]请在地图编辑中添加对应的机器人标定图元,推送地图后点击->开始标定->执行标定任务链,等待任务链执行完毕后点击->停止标定,在标定结果理想的情况下点击->设置标定数据。
6.[标定运动能力/标定 IMU 偏摆角系数]确保机器人前后有1米的运动空间,确保机器人有原地旋转一周的空间,请勿与机器人有任何接触,标定最大速度时机器人将会高速旋转(注意叉车原地旋转一周的空间)。
7.单舵轮车,舵角小于-90°~+90°范围,不能使用[最大速度/加速度标定]和[标定 IMU 偏摆角系数]
标定结果理想的情况下点击->设置标定数据 后生效。
本期介绍到这里就结束了
敬请关注下期介绍
仙知简介
上海仙知机器人科技有限公司,是一家以移动机器人研发与制造为核心的创新型公司。作为移动机器人领域内的高新技术企业,仙知掌握了具有自主知识产权的移动机器人核心算法,并在自动化行业内,拥有丰富的无人化项目经验。仙知机器人致力于服务自动化领域各行业集成商,并为合作伙伴提供全方位、场景化的产品、技术和解决方案。
目前公司为集成商提供的全系列激光导航移动机器人及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、科研教育等领域广泛应用。
-
全球机器人产业的聚集高地,匹茨堡的创新秘诀2019-08-07
-
服务机器人能否跑出现象级独角兽?2019-08-07
-
缺少一个运动脑,机器人只能是“人工智障”2019-08-07
-
总投资3亿元!碧桂园机器人项目落户东莞2019-08-07
-
智慧物流仓储建设加速 看人工智能企业如何构建物流机器人“大脑”2019-08-07
-
大众与Stable Auto合作,用机器人为自动驾驶汽车充电2019-08-07
-
智能呼入机器人 为呼叫中心全自助服务而来2019-08-07
-
工业机器人的未来市场规模2019-08-06
-
成功案例丨仙知机器人助力汽车零部件制造商解决物流难题2019-08-06
-
一场机器人的饕餮盛宴:2019世界机器人大会将于8月20日正式开启2019-08-06
-
中国制造机器人还要多长的路要走?2019-08-05
-
扫地机器人哪个牌子好?灰尘过滤让家居环境更加洁净2019-08-05
-
智能新战场,社会属性的智能移动机器人2019-08-05
-
AI芯天下丨智能新战场,社会属性的智能移动机器人2019-08-05
-
工匠社与腾讯王者荣耀联合打造盾山机器人,ChinaJoy首亮相2019-08-05