机器人任意曲线轨迹规划基础——样条曲线
来源:智能网
时间:2020-03-11 18:02:32
热度:78
机器人任意曲线轨迹规划基础——样条曲线机器人的轨迹规划有很多种方式,比如三次五次多项式轨迹规划,S型轨迹规划等。这些类型的速度规划简单实用,已知开始结束状态和速度加速度限制,就可以
机器人的轨迹规划有很多种方式,比如三次五次多项式轨迹规划,S型轨迹规划等。这些类型的速度规划简单实用,已知开始结束状态和速度加速度限制,就可以规划出一条速度曲线。但正因为简单,所以经常只能应用于规则路径的规划。而对于任意曲线的轨迹规划,只有起点终点状态的规划就显得力不从心了,这时候就要用到基于样条曲线的轨迹规划。
最早的样条曲线都是通过物理方法得到的,把一根有弹性的木条,用工具将特定的一些点固定,样条自然弯曲形成的曲线就是样条曲线。这样形成的曲线,曲率变化连续均匀,非常适合用作速度规划。
现在计算机生成样条曲线,可以根据理想轨迹,生成拟合样条曲线的经过点或者控制点,经过解方程,或者迭代方法,求出样条参数,就可以得到一条拟合原轨迹的曲线。
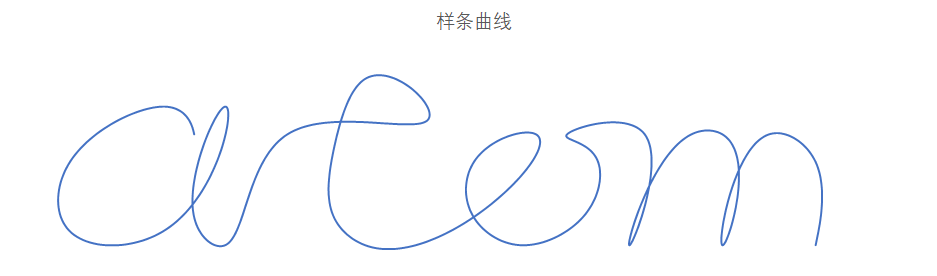
图:样条曲线
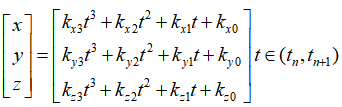
这种曲线本质上是一条空间中的分段参数曲线,其中每一小段的XYZ三个方向的运动方程,都是一个关于时间t的多项式函数,样条曲线的次数就是这个多项式的最高次数。
样条曲线次数越高,运动轨迹越接近于原始轨迹,运动连续性也更高;但同时,轨迹曲率较大的地方也会限制运动速度,导致平滑性降低。样条曲线的轨迹规划就需要根据实际机器人应用场景,在运动的平滑性和轨迹的复原性之间找到一个平衡点,达到理想的运动效果。
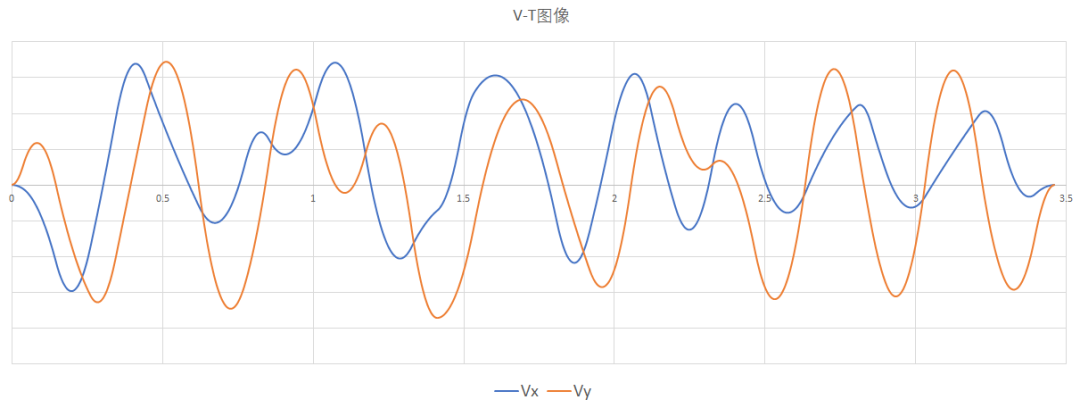
下面的速度时间图像就是对上图的轨迹进行规划后的结果
再给大家清晰的展现一下机器人基于样条曲线的轨迹运动,感兴趣可以多多留言交流哦!
最后,说一句题外话:这场战“疫”我们就要胜利了,但是大家还是要多多注意哦~
-
浅析自动驾驶汽车路径规划算法2020-03-06
-
自动驾驶汽车路径规划算法浅析2020-03-05
-
一汽奥迪新车规划:今年推23款新车 全新一代A3不到19万2020-02-10
-
对话HERE亚太区高级副总裁Stanimira Koleva:海外图商曲线入华背后2020-01-22
-
全球汽车材料科学学院落地上海,3M“曲线造车”?2020-01-15
-
2020年将至,丰田的纯电动战略规划走到哪一步了?2019-12-18
-
3家上市,医美头部资产稀缺,企业寻求实在的业务增长和利润曲线2019-12-13
-
现代汽车中长期规划“2025战略”2019-12-10
-
国务院印发《长江三角洲区域一体化发展规划纲要》 强调要实现自动驾驶汽车产业化应用2019-12-03
-
国务院印发《长江三角洲区域一体化发展规划纲要》,强调要实现自动驾驶汽车产业化应用2019-12-03
-
莱西产业规划和创新发展高歌勇进2019-11-22
-
百度发布“区块链智慧城市”规划2019-11-09
-
华为曲线“造”车,野心何在?2019-11-04
-
频率规划助中国5G发展抢得全球先机2019-10-15
-
3D Systems的VSP骨科虚拟手术规划平台获得FDA许可2019-09-29