打造一款实用的仿真软件
一款优秀的仿真软件应该是什么样子的?
是要把真实道路场景完全“搬”到电脑上吗?汪堃对此表示否认。在他看来,这种基于游戏引擎开发的仿真软件,场景的确非常真实,但实用性却不高。
一般而言,游戏引擎的图像渲染可以做到特别真实,但过程中会消耗大量额外计算资源,不利于大规模应用,且渲染效果与真实物体状况存在一定差别,对感知能力的提升有限。此外,由于这属于一种Re-build软件(基于第三方软件开发),与自动驾驶软件的开发相互独立,因而难以保证各个模块确定性,这可能导致整个仿真软件存在不确定性,最终影响可用性。

不同于此,轻舟智航自主研发的仿真软件摒弃了复杂的渲染工作,界面简单,仅保留感知结果,包括3D Box和雷达点的叠加。与此同时,该软件还能做到与车载系统基本一致,能在仿真中复现路上出现过的问题,以此进行修复,保证再次上路时不出现同样问题。
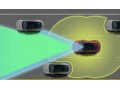
在其展示的麦当劳Drive-through场景仿真界面中,轻舟智航用绿色框代表车辆,黄色框代表行人,白色框代表当时实际行驶轨迹。虽看起来并不“华丽”,却能真实反映当时情况,以求简单高效。
“目前自动驾驶技术已经解决了90%的问题,但由于包含边界化难题,剩下的10%可能要花费同样多甚至更多精力来解决。”于骞表示,“(解决问题)关键在于建立自动化生产工厂。”因而,轻舟智航在设计仿真系统时,考虑到大量工具链和仿真测试环境的建立,希望能在自动驾驶车实际上路前,提前暴露潜在问题。
据汪堃介绍,轻舟智航仿真系统的系统架构可分为5层,分别为自研Car OS、核心仿真器及评估器、仿真周边工具链和基础架构、大规模场景库构建、分布式系统仿真平台。

其中,最底层的Car OS能够借助底层的通讯系统来保证模块之间的高效通讯,向上一层的核心仿真器及评估器,能够从安全性、真值、法规、舒适度、状况等多个维度评估自动驾驶车,保证仿真系统的确定性,再上一层的仿真周边工具链和基础架构,则能高效利用全部数据,保证整个数据闭环的有效性。
在轻舟智航看来,有效数据、智能仿真系统以及决策规划框架是推动技术向前转动的“齿轮”。换句话说,仿真系统是二者之间的纽带——在收集大量数据后,轻舟智航能够借助仿真及相关工具链,形成数据测试闭环,支持算法的测试和迭代,不断修改决策规划框架,以求保证自动驾驶车的安全性和可用性。这种方式能够较大化利用有效数据,降低测试成本,提升开发效率。
目前,业界致力于实现L4级自动驾驶的公司几乎都拥有自己的仿真系统,但他们的业务重点多集中在算法研发层面。对于仿真平台的精心打造,使轻舟智航看起来多少有些与众不同。想用最少的人、最少的工具、做最难的事,就这家年轻的自动驾驶公司公司而言,目标远大,但未来仍充满挑战。
除了美国硅谷,轻舟智航还在中国北京、深圳、苏州等多个城市设有办公室,本次是其首次在国内公开亮相。公司表示,将在2020年完善大量的工具链以及仿真测试环境,以建好“自动化规模生产的工厂”,更多的落地场景则将择日进行公布。