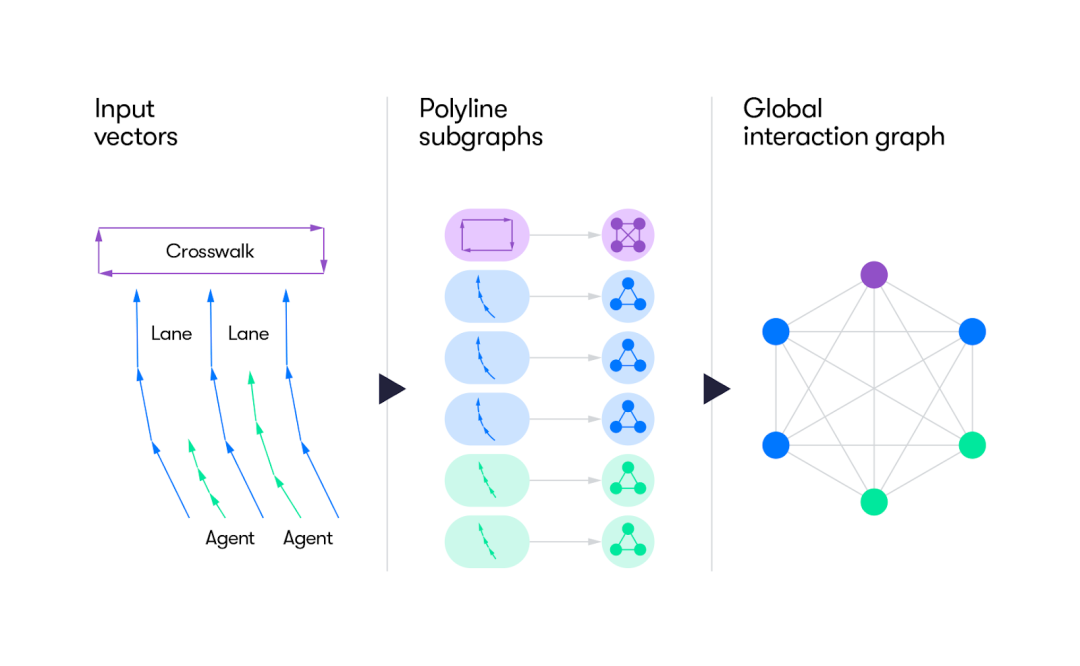
通过这个过程,神经网络获得了各种向量之间的关系。例如汽车进入十字路口或行人接近人行横道时,就会发生这些关系。通过学习道路特征和对象轨迹之间的这种相互作用,VectorNet 能够通过学习不同的行为模式来更好地预测其他道路参与者的行为。
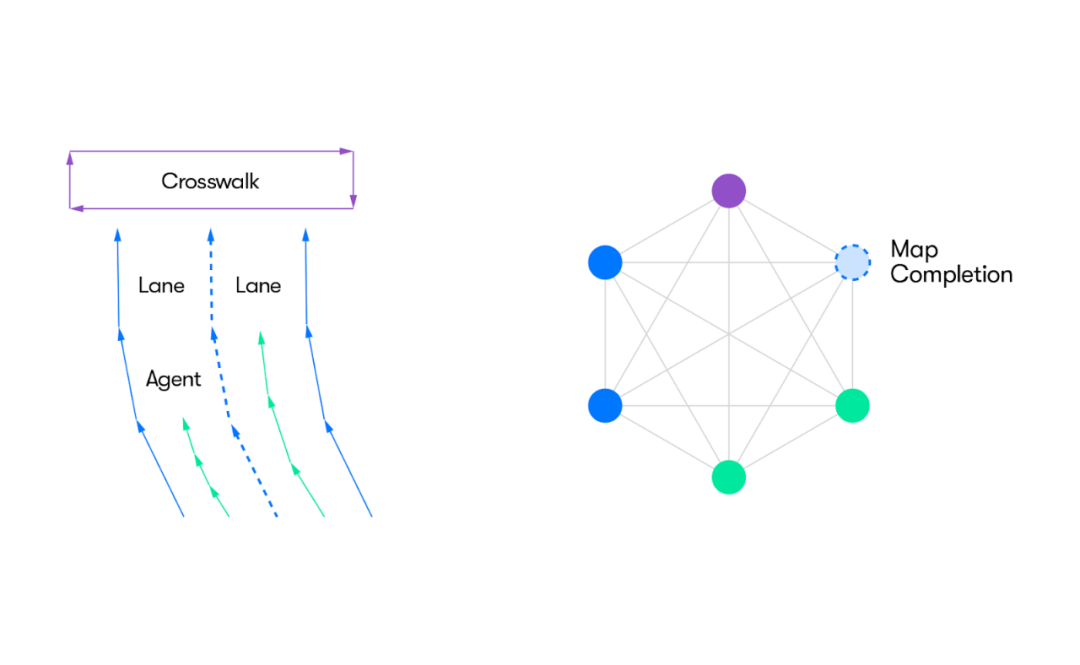
为了进一步增强 VectorNet 的功能,waymo对该系统进行了训练,以从模糊线索中学习,以推断出车辆周围接下来会发生什么,从而做出更好的行为预测。例如,重要的场景信息通常在行驶时会被遮挡,例如树叶遮住停车标志。当人类驾驶员遇到这种情况时,即使他们看不见,他们也可以借鉴过去的经验来推断发生某事的可能性。通过在训练过程中随机掩盖地图特征(例如在四通路口的停车标志并要求网络完成),VectorNet可以进一步提高Waymo Driver对周围世界的了解,并为意外做好准备。
验证VectorNet的性能

将VectorNet与ResNet进行比较,发现VectorNet的计算和位移误差有所改善。与最先进且使用最广泛的ConvNets之一ResNet-18相比,VectorNet的性能提高了18%,而每个场景只有50个代理时,仅使用29%的参数,而且仅消耗20%的计算量。
VectorNet使waymo能够更好地适应这些新领域,更有效地学习,并帮助实现完全自动驾驶。