ICRA 2020 | 模块化机器人SMORES-EP的并行自组装
ICRA 2020 | 模块化机器人SMORES-EP的并行自组装作者是宾夕法尼亚大学GRASP实验室在读博士生—刘超,主要从事模块化机器人的研究,包括硬件设计、控制及运动规划算法

作者是宾夕法尼亚大学GRASP实验室在读博士生—刘超,主要从事模块化机器人的研究,包括硬件设计、控制及运动规划算法、决策等,在各大机器人会议和期刊发表论文多篇,包括ICRA,IROS,RSS以及RA-L,并获得IROS最佳搜索救援机器人论文提名。
本文将分享他在ICRA 2020上的最新工作:模块化机器人SMORES-EP的并行自组装方法。该方法实现了最短的模块运行距离并通过实验验证了方法和对接控制的可靠性。


一、引言
自重构模块化机器人由一种或几种形态的模块构成,模块之间可以通过相同的连接方式组合成不同的形态,并且可以通过连接装置传递力、力矩以及交换信息。这种机器人可以像传统的机器人一样通过改变关节变量来调整姿态,做出不同的行为,例如抓取、操纵和移动,同时还可以对自己的形态做出很大程度上的改变,即通过改变模块之间的连接方式实现了关节拓扑结构的改变,从而更好地适应不同的环境、行动或任务。自重构模块化机器人一般分为三种类型:chain-type, lattice-type和mobile-type [1]。SMORES-EP(图1)是一种混合类型机器人,可以实现上述三种类型的模块化机器人的所有运动形式。

图 1:一个SMORES-EP有四个自由度和四个连接器,两个模块之间一共有17种不同的连接方式。
每个SMORES-EP模块有四个EP-Face连接器[2] 和四个自由度,独特的运动学结构使得任意两个模块之间存在着17种连接方式,因此SMORES-EP模块可以组成种类繁多的不同形态来适应不同的环境和任务。比如在图2a中,7个SMORES-EP模块组成了一个可以快速移动的小车的形态,从而能够快速地在地面上移动完成探索、运输等任务,但是当遇到崎岖不平的洼地时,这种小车形态并不利于运动,因此这些模块可以变形成蛇的形态(图2b),从而可以通过这类地形[3]。
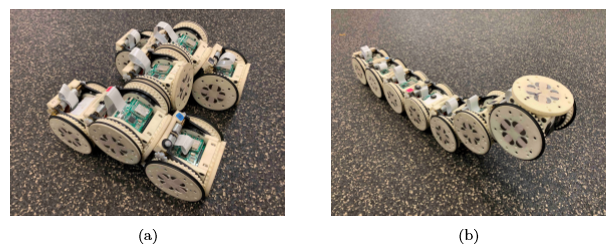
图 2:(a)7个SMORES-EP模块可以形成一个可以快速移动的小车, 从而能够快速移动;(b)同时可以变形成一条蛇来通过崎岖的地形。
每个SMORES-EP模块的左轮和右轮两个自由度赋予了其在地面上以差分驱动小车的形式自由运动的能力,这个特性使得每个模块可以独立于其他模块单独运动。配合SMORES-EP的自重构能力,多个模块可以表现出一定的群体行为。类似于自然界中生物的群体智慧行为,比如一只小蚂蚁的行为能力极其有限,但是一群蚂蚁却能够表现出惊人的、极大超出每个个体能力极限的行为。
一个SMORES-EP模块虽然有4个自由度,但是运动能力有限,能适应的环境和任务场景也因此收到了很大限制,例如一个模块是无法通过一道较宽的沟壑的,但是三个模块可以组成一个蛇形从而通过这道沟壑。多个分散的模块协同工作、自主拼装成一个复杂形态的能力可以极大地增强这类模块化机器人的适应能力,使其完成任一单独的模块均无法完成的任务,这个运动规划过程称之为self-assembly planning。
3 首页 下一页 上一页 尾页上一篇:工业移动机器人基本介绍
-
仙工智能(SEER) SRC核心控制器荣获移动机器人供应链优质企业-控制模块类奖项2020-08-23
-
乘风破浪的新松又出新产品,协作机器人与未来只差一个Ducomind2020-08-23
-
质量流量传感器模块在CPAP呼吸机中具有调节气流控制的作用2020-08-23
-
模块化造车真的成本低!星越对比50万的宝马X3竟丝毫不落下风2020-08-23
-
环旭电子与博通合作推出SiP无线芯片模块 布局Wi-Fi 6E市场2020-08-23
-
GMV破1万亿美元!阿里5年前定的小目标实现了:还有一个大目标2020-05-23
-
AirPods Pro开始在越南组装:苹果生产转移迈出重要一步2020-05-22
-
靠什么超越特斯拉?华为用独步全球的5G技术甩出一个“王炸”2020-05-15
-
推进人手一个机器人愿景,UiPath端到端超自动化平台问市!2020-05-14
-
推进人手一个机器人愿景,UiPath端到端超自动化平台问市2020-05-14
-
康复机器人是怎样的一个设备?前景怎样?2020-05-14
-
Dialog半导体推出Wi-Fi + BLE组合模块,引领新一波IoT连接技术!2020-05-11
-
金山云纳斯达克上市,这是一个敢想并且敢All in的故事2020-05-11
-
从Robotaxi到智慧公交,长沙给智慧交通打了一个样!2020-05-07
-
从Robotaxi到智慧公交,长沙给智慧交通打了一个样2020-05-07