美国国家工程院院士、福特技术研究员Dimitar Filev:用于智慧出行的智能车辆系统
美国国家工程院院士、福特技术研究员Dimitar Filev:用于智慧出行的智能车辆系统2019年第一期(总第三十二期)“钱学森国际杰出科学家系列讲座”于5月7日在中国科学院自动化
2019年第一期(总第三十二期)“钱学森国际杰出科学家系列讲座”于5月7日在中国科学院自动化研究所举办。本期讲座邀请到美国福特公司创新与研发中心技术研究员Dimitar Filev博士做题为“Intelligent vehicle systems for smart mobility ”的报告。
报告聚焦人工智能技术在福特智能汽车系统中的应用,重点介绍机器学习、决策方法以及算法在福特产品的生产过程中的应用,包括机器学习应用于车辆诊断和校准、驾驶建模和车辆个性化,燃油经济性优化和自动驾驶。报告还讨论了在车辆控制和信息系统中集成人工智能技术的经验教训、正在进行的研究以及作为智能移动应用构建模块的未来趋势。
嘉宾介绍:
Dimitar Filev 博士现任美国国家工程院院士、福特研究创新与研发中心技术研究员,主要进行计算智能、人工智能和智能控制的研究,以及它们在自动驾驶、车辆系统和汽车工程中的应用。发表学术论文200余篇,14000余次引用的会议论文,拥有美国专利100多项。2008年获IEEE SMC协会诺伯特·维纳奖,2015年获IEEE CIS协会先锋奖。他获于1979年在捷克理工大学(Czech Technical University)获得电气工程博士学位。目前是IEEE会士和美国国家工程院院士。曾于2016年-2017年担任IEEE系统、人与控制论学会(IEEE Systems, Man, & Cybernetics Society)主席。
内容:
早上好,我的名字是 Dimitar Filev 非常感谢王教授的精彩介绍,我跟他共同在IEEE以及一些团体工作多年。但是我们从没有正式合作过,但我认为现在是个好机会,因为我们现在在北京有研究中心,我们可以建立专业的合作,我本人非常期待。非常高兴今天能再次与你们进行分享。

福特在汽车工业领域拥有悠久的历史,生产了许多汽车和卡车。福特不仅仅是汽车生产商,也是一家科技创新公司,我们在全球范围内拥有多家研究和先进工程中心,分别在墨尔本、南京、慕尼黑等等。
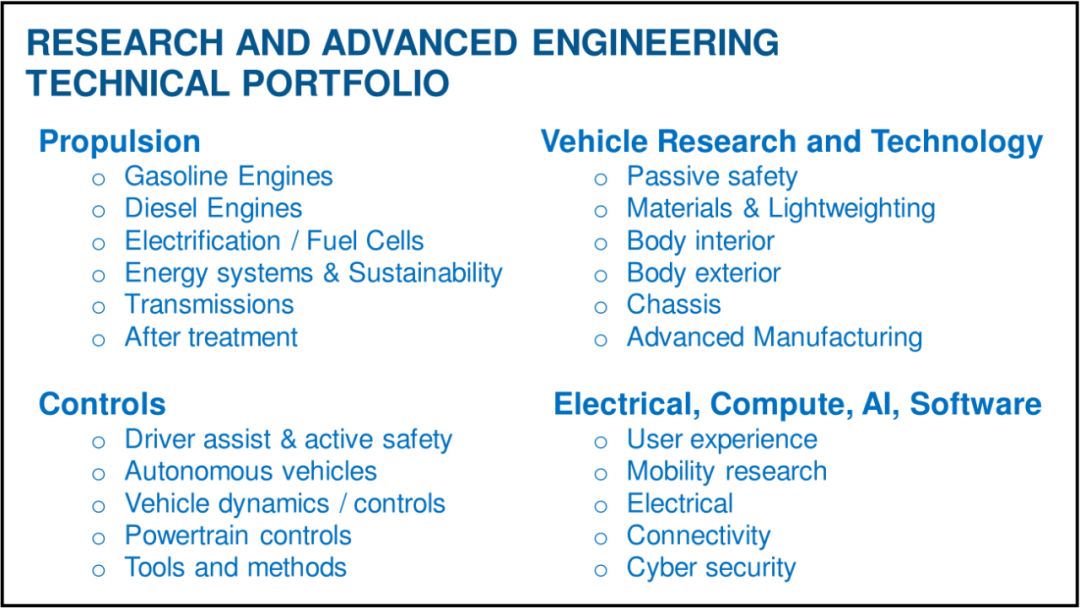
这是我们主要的四个研究领域,第一个集中于动力系统(propulsion),为车辆提供动力,包括汽油引擎、柴油引擎、能量管理以及传动;第二部分是汽车研究与技术(Vehicle Research and Technology),由被动安全、材料&轻量化、车架内外部和底盘等组成;第三部分是控制(Control),主要是驾驶辅助、自动驾驶车辆以及车辆动态和控制;最后是电子(Electrical),Compute单元专注于用户体验、电子以及信息安全。
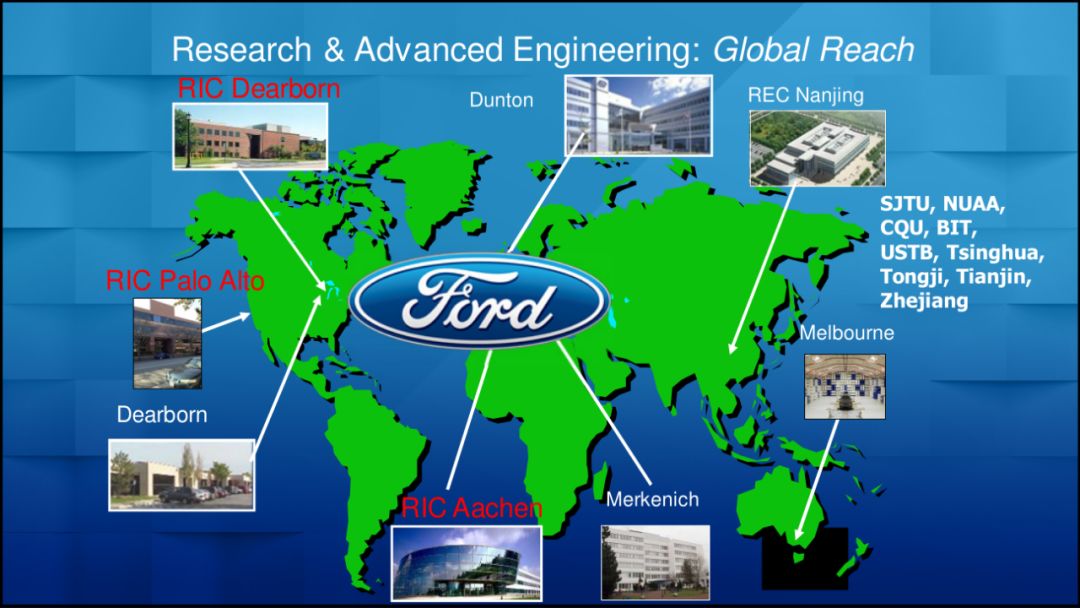
福特的“研究&先进工程组织”由2名亨利福特技术Fellow领衔,拥有20名高级技术领导、数百名技术专家,其中34%具有博士学位,分别位于密西根的Dearborn、德国的Aachen、加州的 Palo Alto三个中心。
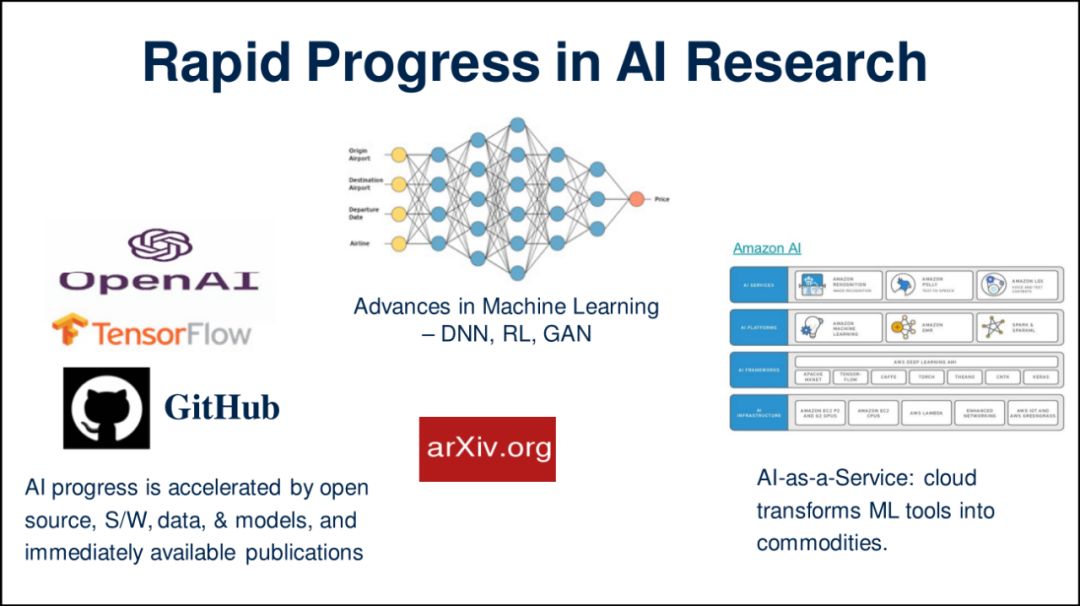
福特是世界上第一个将神经网络应用到阿斯顿马丁的汽车点火失败检测中去的,点火失败会导致燃烧不充分,后来将这个方法应用到了福特的V10引擎。大概在二十年前,人们不相信AI能提供任何效果,如今是AI发展的好时机。涌现出了像 Github、Tensorflow 等这样的好的资源,这些开源的人人都可以用,arxiv上也有成千上万的论文可供阅读。
AI的进步和汽车的改变是推动智能系统部署在车辆上的主要的驱动力。车辆产生的数据从过去的每小时0.5GB到后来的25GB再到现在无人驾驶车辆的1.7TB。
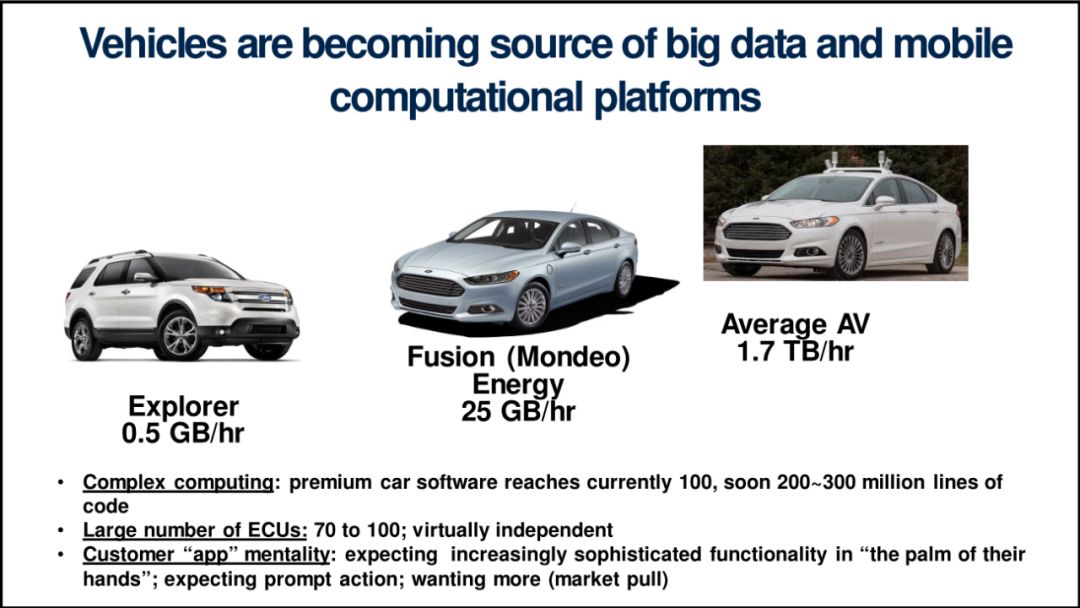
如此大量的数据如何实时的进行拟合以及合理利用是个重要的话题,车辆已经成为了大数据源和移动计算平台,设备制造商(OEMs)和交通系统都在发生着改变。传统的车辆已经具备很好的动力总成系统、底盘系统、空调系统和娱乐系统,同时车辆具备一些智能驾驶辅助系统例如ABS、车身动态稳定系统、寻迹系统等。
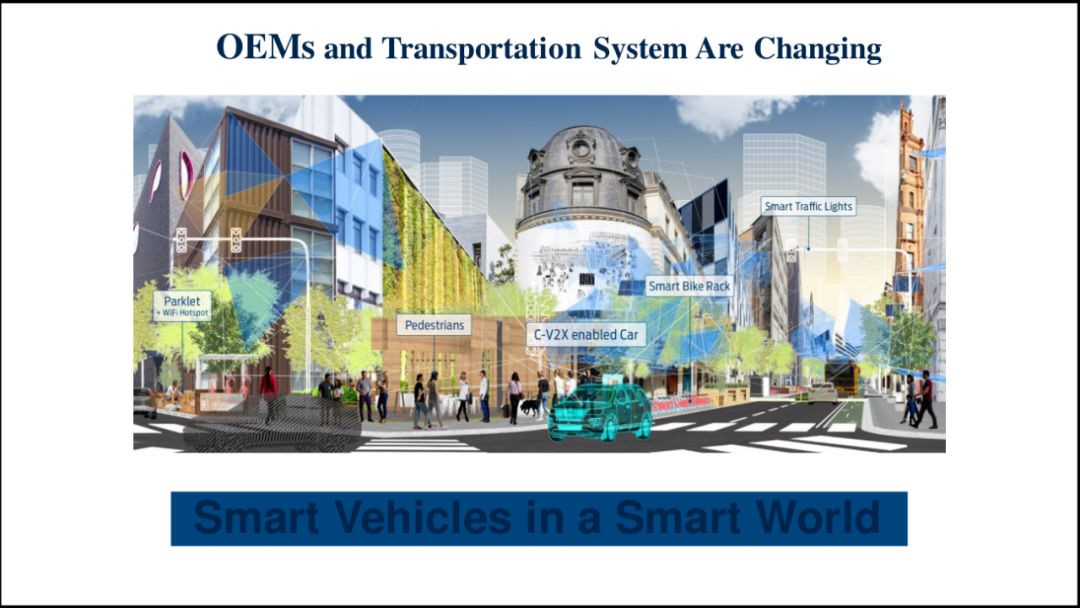
这些系统已经非常智能,但我们在此基础上设计了智能用户界面让车辆更加定制化以适应不同的用户。虚拟驾驶系统与交通移动云连接,控制着车辆。因此,定制化和智能化是自动驾驶车辆发展的两个方向。
接下来讨论几个驾驶汽车中的应用以及福特在自动驾驶中的研究。在汽车控制中有自动动力系统控制、自动转向控制和半自主悬架系统这些不同的系统经过标定可以实现舒适、常规和运动三种模式之间的切换。
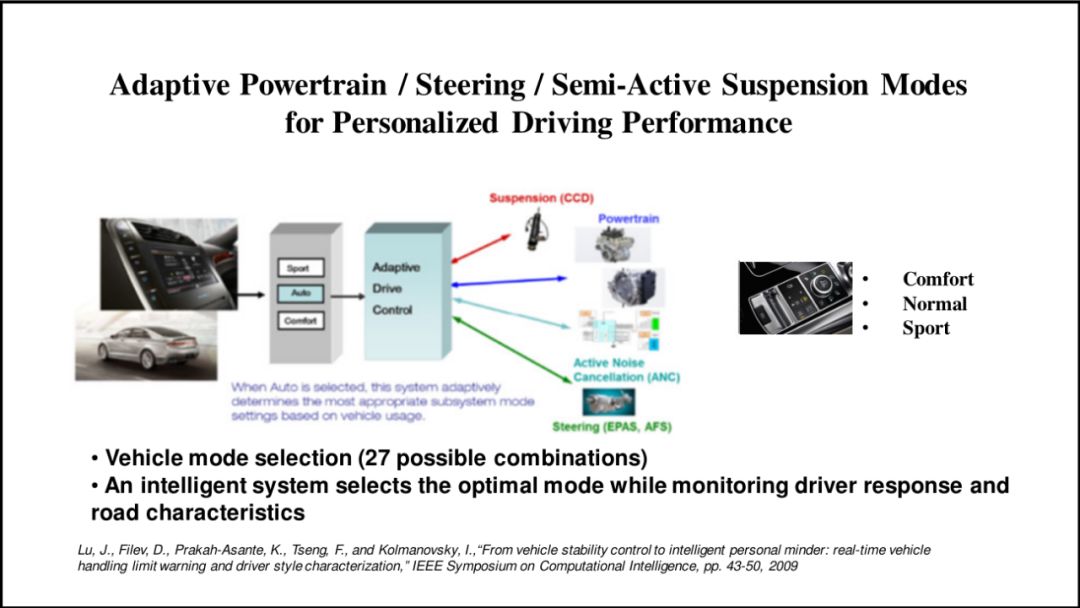
车辆模式的选择共有27中组合,让驾驶员在这之间进行选择是一件困难的事,而智能系统则可以基于道路特点和驾驶员的反应选择最优的模式,这也是定制化的一个方面。另一个重要的应用是智能巡航控制,它基于速度曲线寻找最优的巡航速度设置点来达到最优化燃油消耗的目标。
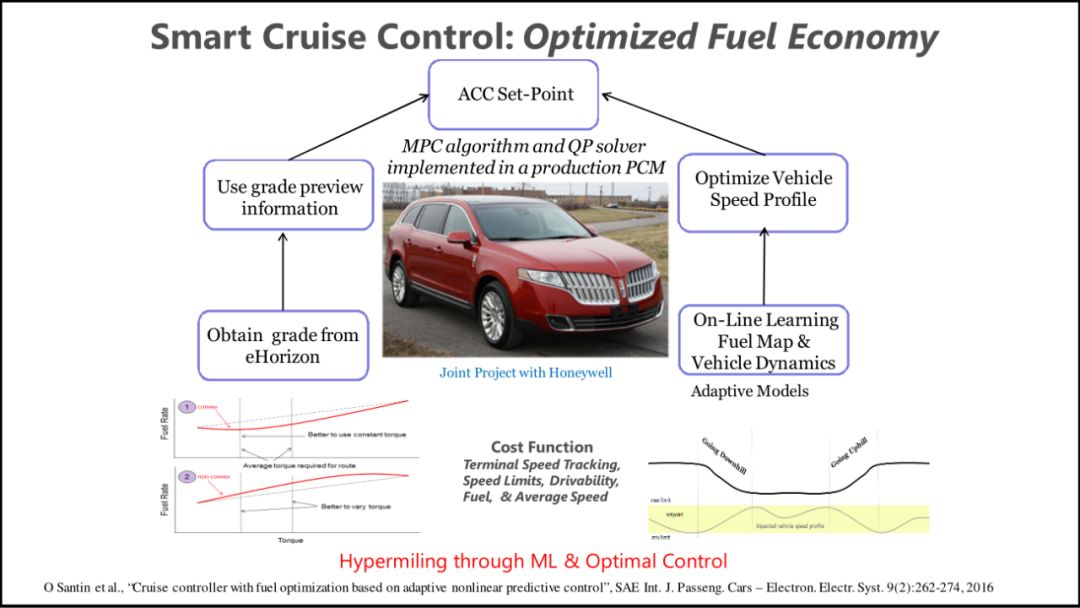
通过对数字地图的分析、交通标志的识别、道路几何形状的辨别系统能够为驾驶者建议最优的加减速、档位,提供最高效的驾驶模式选择。
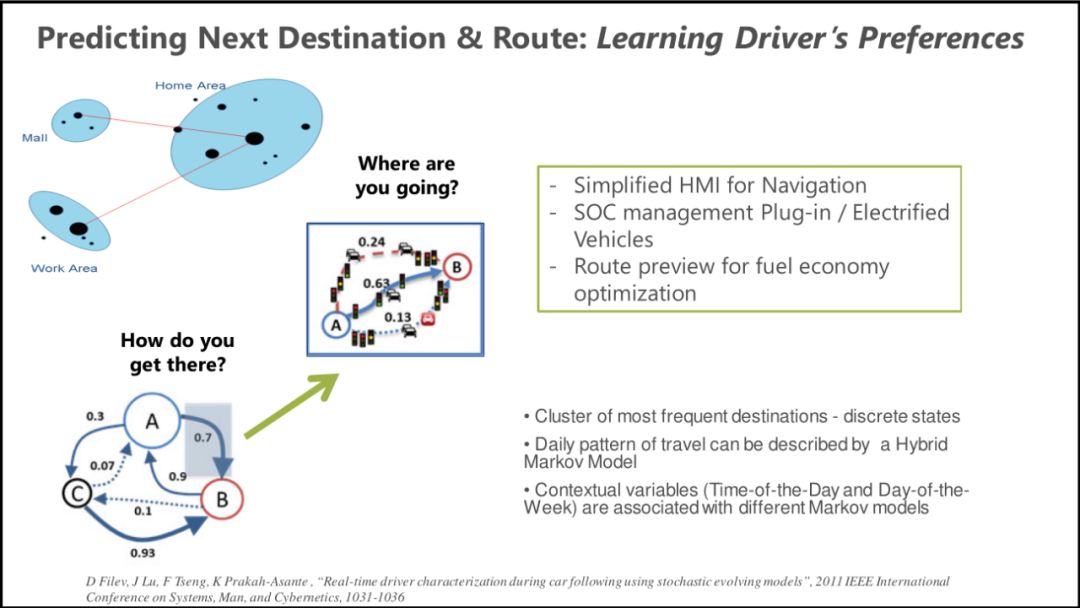
此外,分析驾驶员的行为由此生成评估报告、根据车辆在不同时间频繁的行车、停车的记录可以估计出下一个目的地。
福特在自动驾驶领域的布置和发展包括投资了 Argo AI 以及成立了自动驾驶子公司AV LLC,这两家由福特所有的独立实体计划在2021年前完成研发并投入生产。
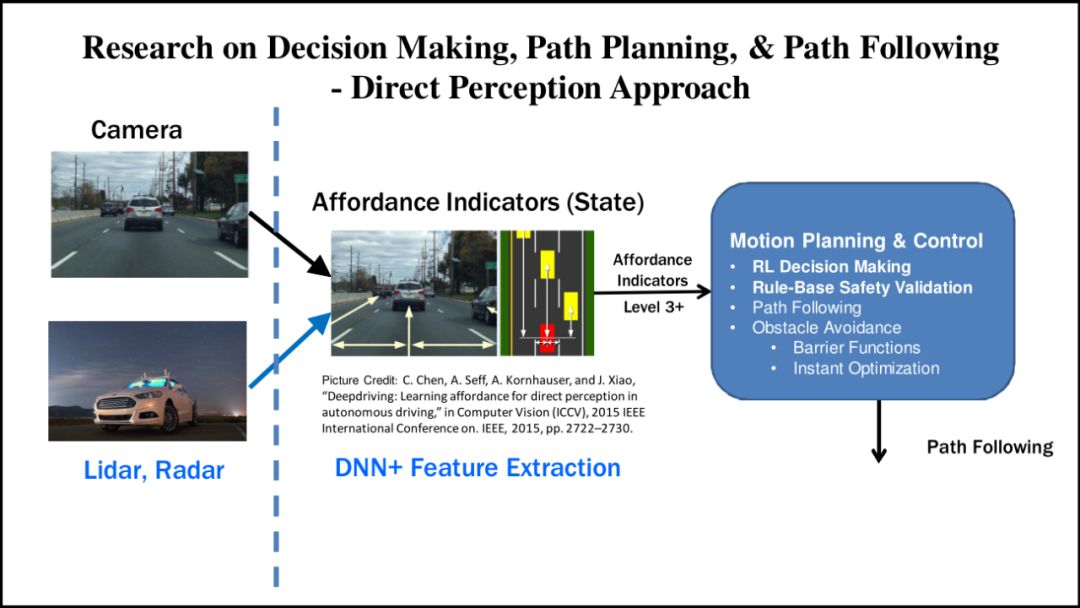
福特研究自动驾驶采用的是分层级的方法,层级从反射级 Reflexive 到深思级 Reflective。反射级指的是当人们在驾驶时不需要思考而下意识作出的一些举动,Reflective 则是完全相反的,比如人在高速驾驶的时候会不断地思考获取最佳的决策。
分层级方法有三个层级,Decision Making 曾属于高层规划,基于强化学习、博弈论方法;稍低一个层级的 Path Planning主要完成避障等场景;沿着规定好的轨迹行驶则是由最后的 Path Following层级使用模型预测控制完成。
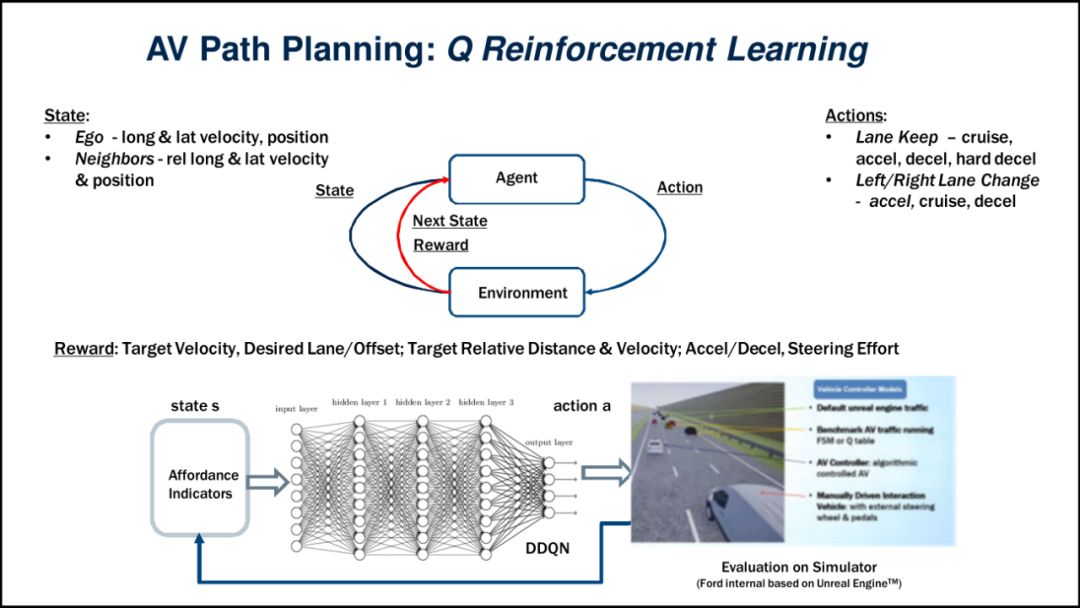
Path Planning 部分使用的是Q强化学习方法,强化学习通过最大化累计收益函数Q函数来获得最佳决策,此处状态为车辆本身以及相邻车辆的实时的横向和纵向位置,行为是车道保持、巡航速度增减以及左右换道。仿真器用来训练神经网络拟合决策Q函数,该算法提供了状态到行动的映射,得到的是贝尔曼方程的实时解。
强化学习近些年变得很火热尤其是谷歌的 Deepmind 推出了AlphaGo取得了成功,他们提出了 Deep Q Learning(DQN),现在几乎成了强化学习的标准。在DQN算法中,我们建立了一个人工目标于是得到:
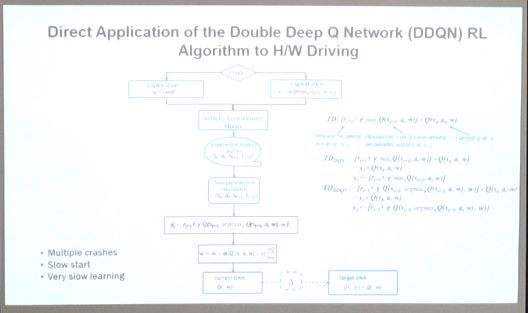
y与Q的差值可类比监督学习中的预测值与标签的差值,由此得到的时域差用来更新网络得到最优值。在此基础上,Deepmind提出了三个主要的改进形成了double DQN,首先是提出适合多层神经网络的Q函数;第二他们提出一个采样任意的minibatch的方式处理训练网络的数据;第三个则是他们提出了两个Q函数分别为当前Q函数和目标Q函数来更新网络,这些改进使得强化学习更加稳定。
然而,当福特直接使用这些方法是发现训练神经网络经常容易失败并且训练速度很慢。因此他们加入了一些常识性的规则,当发现行为不安全时,将安全的行为加入网络,对碰撞的判别会混合到采样随机minibatch中用于网络的更新,最终结果取得显著性效果。
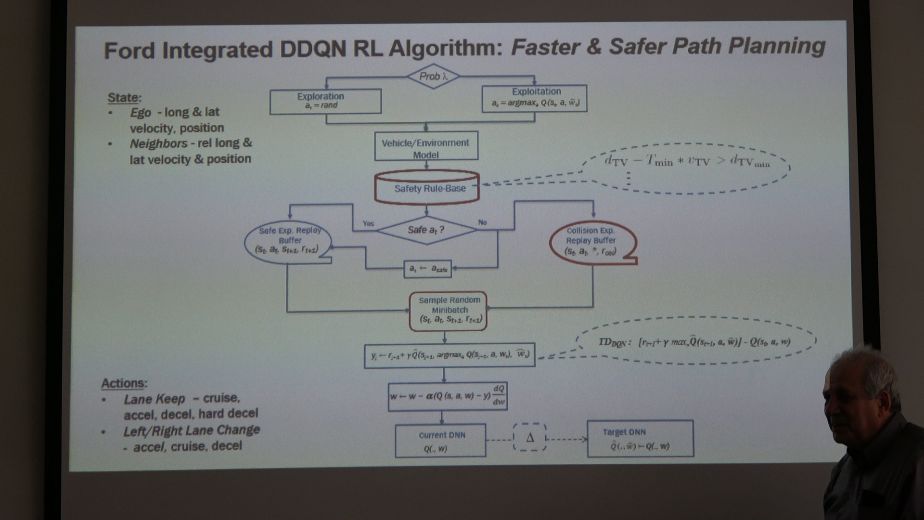
在强化学习中,应该不仅仅依赖于对数据这些短期性的经验的学习,一些常识性的长期经验规则的使用也很重要。
当前智能驾驶汽车算法和解决方案面临的挑战如下:
1、能学习特定驾驶员和环境、拥有最少的手工标定和标签数据的车载或者云平台的实时解决方案;
2、相比较监督式学习更倾向于无监督和半监督强化学习;
3、包含认知信息和物理模型的混合AI算法;
4、AI算法可解释、可验证;
5、拥有鲁邦特性并且可以自评估;
6、维护成本低。
下面介绍一些有效的解决方案,每当我们遇到一个复杂系统时,我们会努力学习用一些复杂函数去近似这个系统例如神经网络,这是其中一种方法。另一种方法使用许多简单的小的子系统进行组合模拟复杂系统。
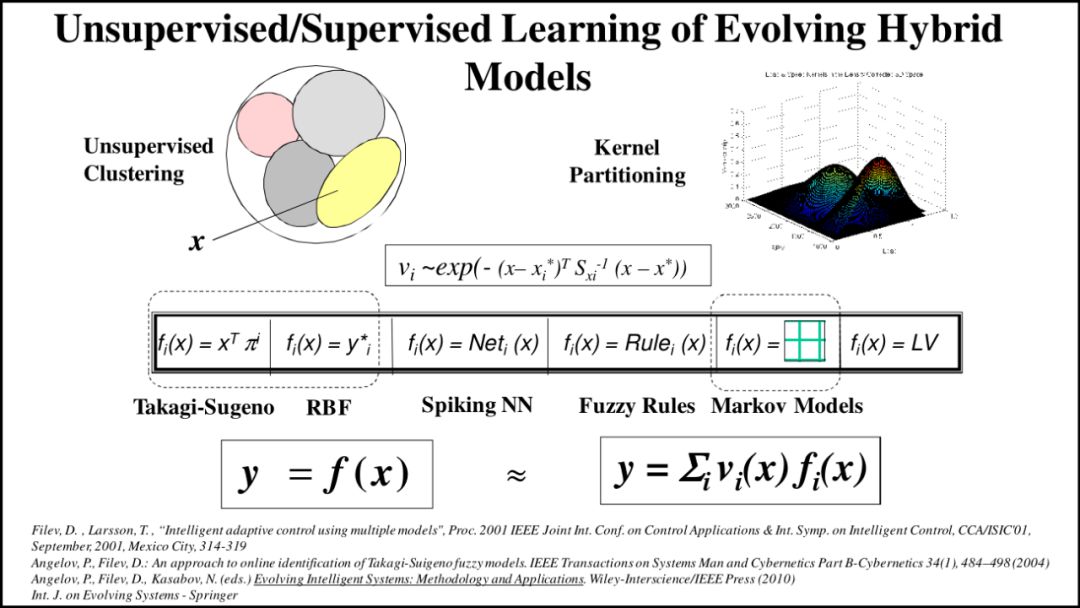
非监督的演化聚类算法可以实现实时的学习对系统的状态空间进行预测,一个重要的例子是对引擎特性具有自适应标定和控制能力的在线空时滤波器。混合马尔科夫模型对于目的地和路径的预测也是非常有效的。神经网络的可解释性是近年来的热点话题,强化学习可以使用神经网络将状态空间映射到行为空间,这是个非线性映射。这种非线性映射可不可以使用其他的映射来近似并且时刻解释的呢?
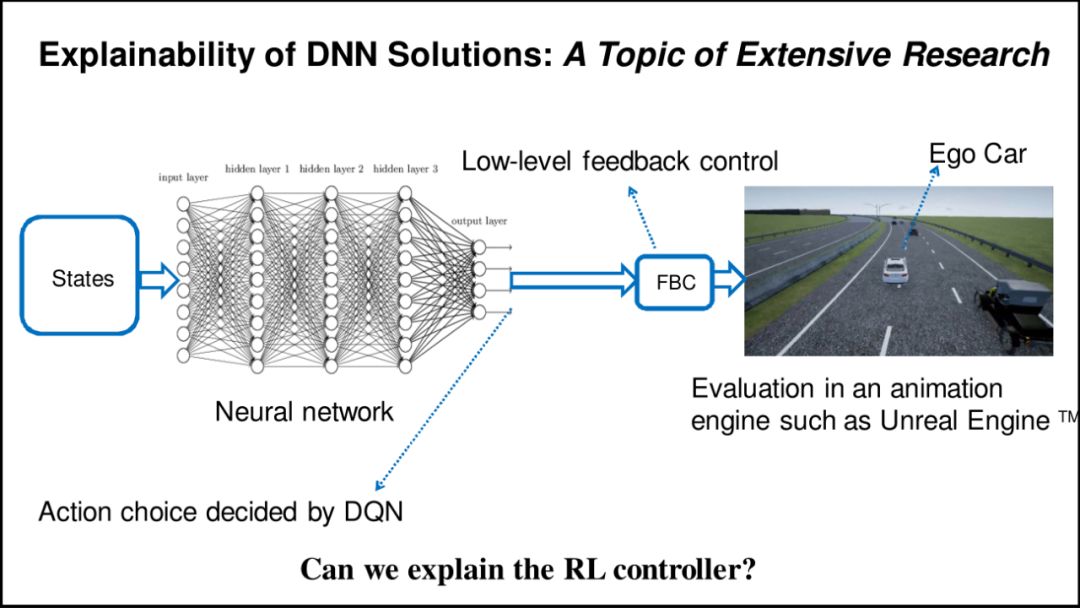
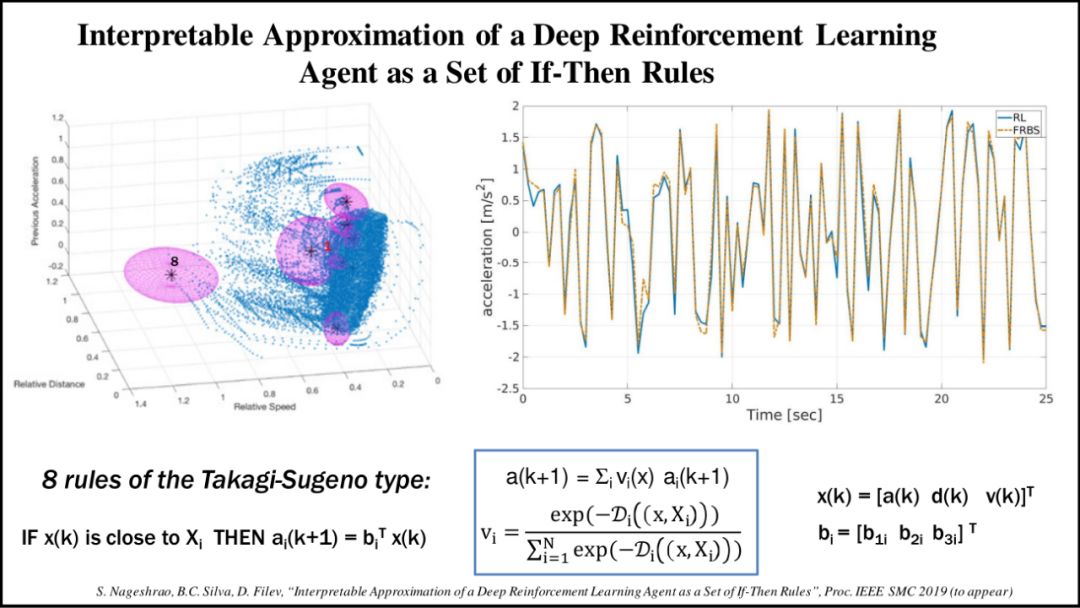
基于强化学习的控制器将状态空间映射到行为空间,而使用模糊控制器基于规则的模型则是一种通用的近似器,通过将强化学习Agent仿真为黑盒子动态系统,它可以被有限级的“if-then”规则近似和解释。以强化学习车辆跟踪控制为例,跟车问题基本是是一种自适应巡航问题,后车需要保持与前车的安全距离、控制好各自的车速以及加速度,传统方法中车速控制器基于吉布斯分布、加速度控制器使用智能驾驶模型(Intelligent Driving Model,IDM)建模,福特使用强化学习,分别建立速度、加速度以及距离的奖励函数,最大化奖励函数得到的结果达到甚至超过传统方法。
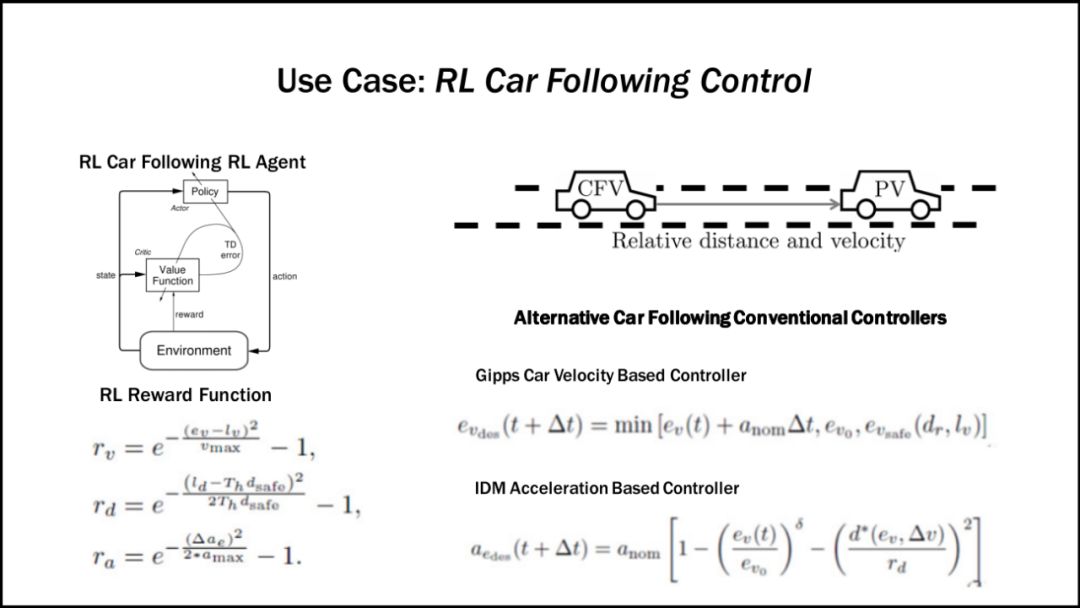
在得到加速度结果后,他们使用聚类算法以相对速度和相对距离作为输入,预测加速度作为输出,对数据进行聚类来近似强化学习控制器,强化学习器被近似为可解释的PI控制器的非线性组合的形式,组合系数为各数据点到聚类中心距离负值的Softmax函数。
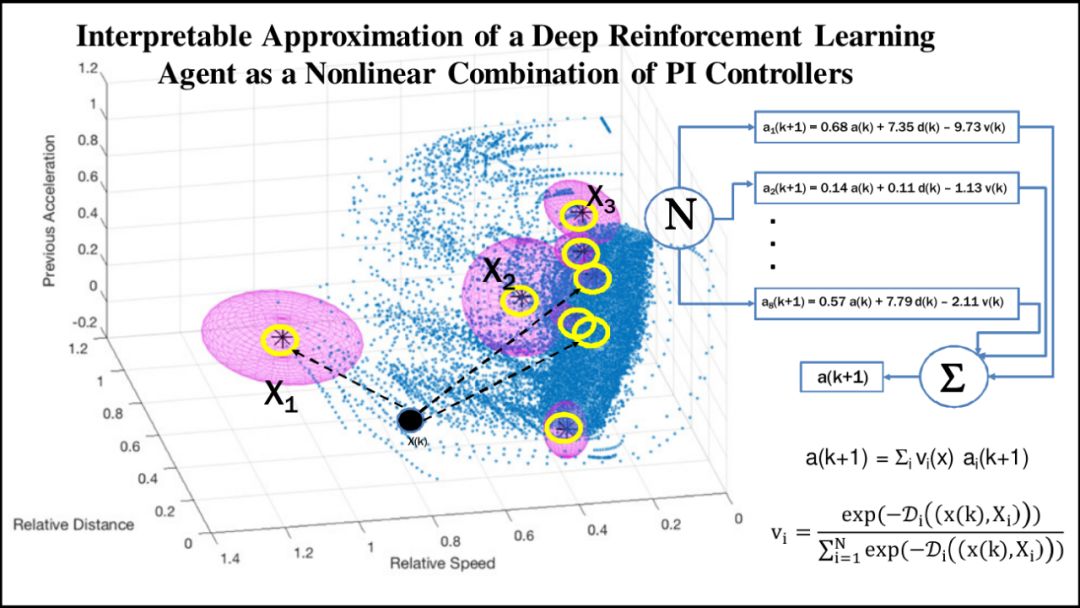
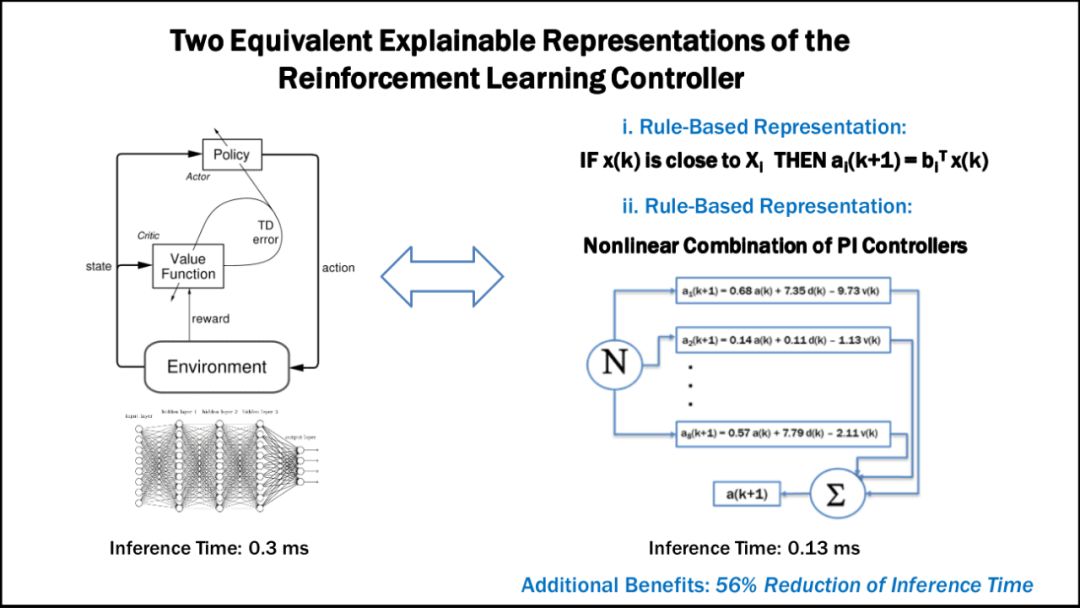
拟合效果基本达到原始强化学习其的性能,但是推理时间从强化学习器的0.3ms降低到了非线性组合的0.13ms。最后,对演化系统地总结如下:
1、使用演化聚类和核粒化的方法讲一个复杂系统实时分解为多个相互重叠的子区域;
2、实时同步学习系统架构以及局部子系统的参数;
3、对具有多个操作模式和多元化行为的系统实时建模;
4、特定的机器学习技巧(无监督聚类与监督学习的组合);
5、反映人类从现实中学习、总结、管理知识的能力。
我们在此提到的演化系统是多个子系统的组合,它的功能非常强大,包含了监督学习方法和非监督学习方法,可应用在实时的无人驾驶大数据处理中。大数据、物联网以及AI技术的快速发展为智能汽车提供了更多的解决方案,AI算法则需要具备更多的人性化、自适应和最小标定以适应嵌入式实施的需求也很广泛,智能汽车的发展为传统AI算法的改进提供了新的发展方向,传统AI算法应与基于规则的系统、认知知识和基于第一性原理的模型相结合,此外,认知模型对统计机器学习的近似使得传统机器学习算法变得可解释和性能的可升。
以上就是我的报告,非常感谢大家。
-
亚马逊全球人工智能会议关注AI最新成果2019-06-18
-
科创板落地,加速AI人工智能企业创新发展2019-06-18
-
我国发布《治理原则》,发展负责任的人工智能2019-06-18
-
预测NBA总决赛六场结果全错,人工智能为何变成“人工智障”?2019-06-18
-
人工智能在未来制造业的发展和应用2019-06-18
-
Teradata CTO宝立明:高级分析将成主流 未来属于机器学习时代2019-06-18
-
八项原则让人工智能发展负起责任2019-06-18
-
人工智能推动招聘行业:求职者都要玩游戏?2019-06-15
-
网络安全中的人工智能:预测以及量化威胁2019-06-14
-
娱乐为王,人工智能影响未来娱乐的三十种方式2019-06-14
-
GE发布基于人工智能的分析工具集,以应对电网运营难题2019-06-14
-
我们离实现通用人工智能有多远?2019-06-14
-
用人工智能赋能法律普及 他们想让近千万用户学法、用法更简单2019-06-14
-
福特将在底特律测试第三代自动驾驶汽车2019-06-13
-
中国科大等利用人工智能预测蛋白质“光学指纹”2019-06-13