当前智能驾驶汽车算法和解决方案面临的挑战如下:
1、能学习特定驾驶员和环境、拥有最少的手工标定和标签数据的车载或者云平台的实时解决方案;
2、相比较监督式学习更倾向于无监督和半监督强化学习;
3、包含认知信息和物理模型的混合AI算法;
4、AI算法可解释、可验证;
5、拥有鲁邦特性并且可以自评估;
6、维护成本低。
下面介绍一些有效的解决方案,每当我们遇到一个复杂系统时,我们会努力学习用一些复杂函数去近似这个系统例如神经网络,这是其中一种方法。另一种方法使用许多简单的小的子系统进行组合模拟复杂系统。

非监督的演化聚类算法可以实现实时的学习对系统的状态空间进行预测,一个重要的例子是对引擎特性具有自适应标定和控制能力的在线空时滤波器。混合马尔科夫模型对于目的地和路径的预测也是非常有效的。神经网络的可解释性是近年来的热点话题,强化学习可以使用神经网络将状态空间映射到行为空间,这是个非线性映射。这种非线性映射可不可以使用其他的映射来近似并且时刻解释的呢?

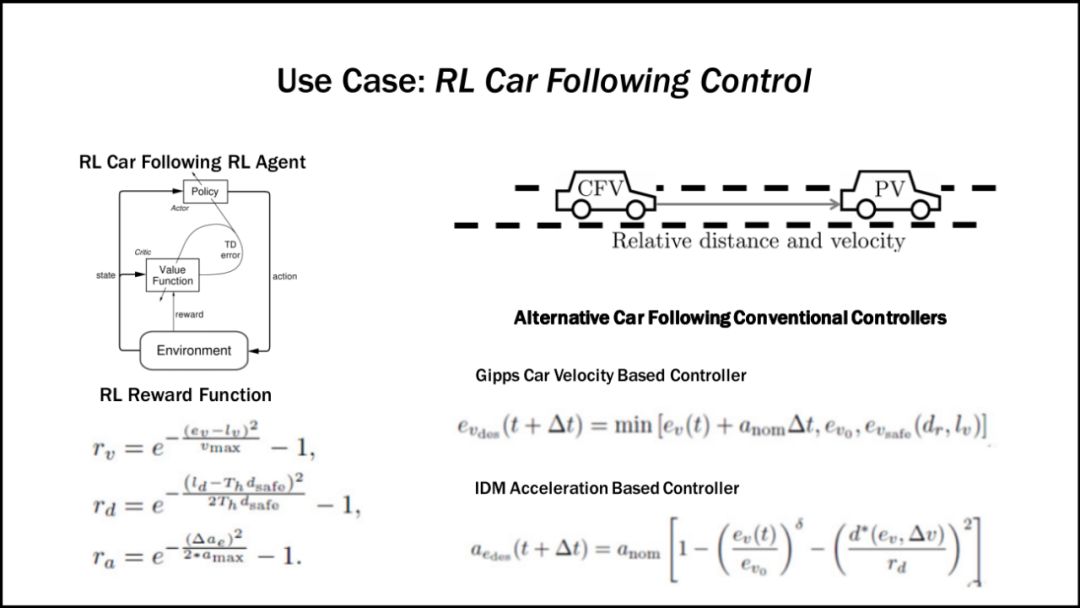
基于强化学习的控制器将状态空间映射到行为空间,而使用模糊控制器基于规则的模型则是一种通用的近似器,通过将强化学习Agent仿真为黑盒子动态系统,它可以被有限级的“if-then”规则近似和解释。以强化学习车辆跟踪控制为例,跟车问题基本是是一种自适应巡航问题,后车需要保持与前车的安全距离、控制好各自的车速以及加速度,传统方法中车速控制器基于吉布斯分布、加速度控制器使用智能驾驶模型(Intelligent Driving Model,IDM)建模,福特使用强化学习,分别建立速度、加速度以及距离的奖励函数,最大化奖励函数得到的结果达到甚至超过传统方法。
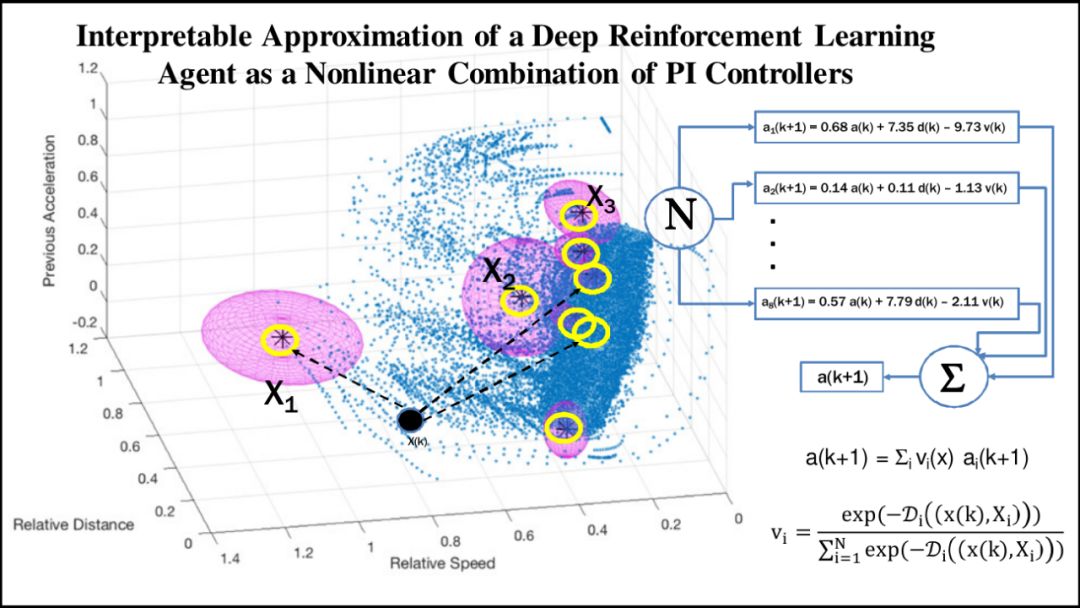
在得到加速度结果后,他们使用聚类算法以相对速度和相对距离作为输入,预测加速度作为输出,对数据进行聚类来近似强化学习控制器,强化学习器被近似为可解释的PI控制器的非线性组合的形式,组合系数为各数据点到聚类中心距离负值的Softmax函数。
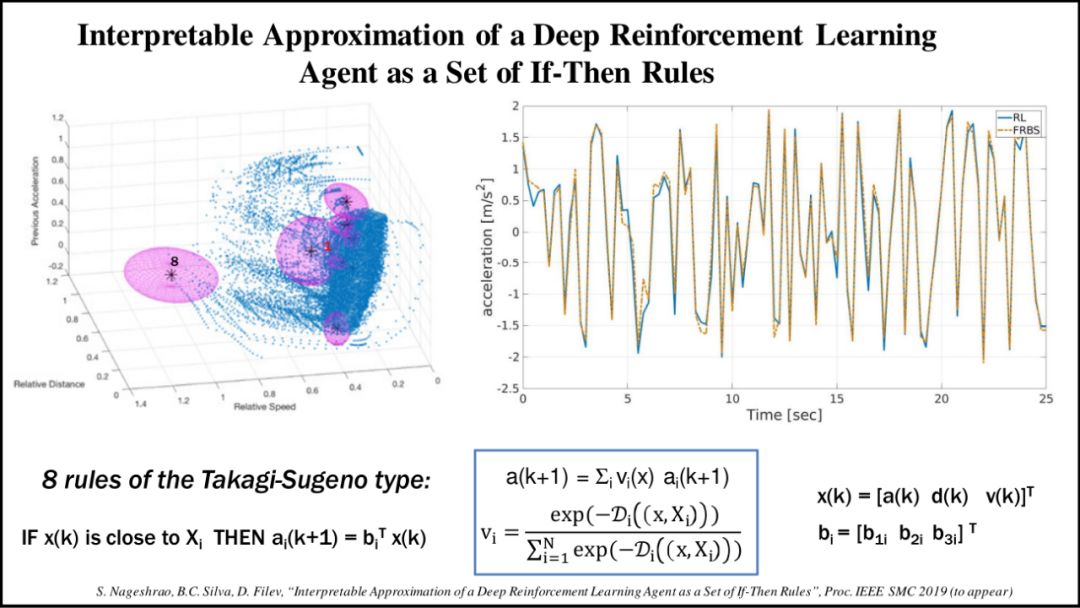

拟合效果基本达到原始强化学习其的性能,但是推理时间从强化学习器的0.3ms降低到了非线性组合的0.13ms。最后,对演化系统地总结如下:
1、使用演化聚类和核粒化的方法讲一个复杂系统实时分解为多个相互重叠的子区域;
2、实时同步学习系统架构以及局部子系统的参数;
3、对具有多个操作模式和多元化行为的系统实时建模;
4、特定的机器学习技巧(无监督聚类与监督学习的组合);
5、反映人类从现实中学习、总结、管理知识的能力。
我们在此提到的演化系统是多个子系统的组合,它的功能非常强大,包含了监督学习方法和非监督学习方法,可应用在实时的无人驾驶大数据处理中。大数据、物联网以及AI技术的快速发展为智能汽车提供了更多的解决方案,AI算法则需要具备更多的人性化、自适应和最小标定以适应嵌入式实施的需求也很广泛,智能汽车的发展为传统AI算法的改进提供了新的发展方向,传统AI算法应与基于规则的系统、认知知识和基于第一性原理的模型相结合,此外,认知模型对统计机器学习的近似使得传统机器学习算法变得可解释和性能的可升。
以上就是我的报告,非常感谢大家
<上一页 3


