数字交通基础设施加速自动驾驶与车路协同发展
数字交通基础设施加速自动驾驶与车路协同发展本文来源:ITS智能交通/ 导读 /本文节选自关志超博士《数字交通基础设施加速自动驾驶与车路协同发展》关志超是交通运输部“智能车路协同关键
本文来源:ITS智能交通
/ 导读 /
本文节选自关志超博士《数字交通基础设施加速自动驾驶与车路协同发展》
关志超是交通运输部“智能车路协同关键技术与装备行业研发中心”执行主任(博士、教授)

概述
当前,中国已经进入交通强国建设、快速城市化进程、经济社会转型变革、智能车路协同创新发展、新基建与数字化转型发展的新时期,新交通模式生态环境正在形成,城市交通与区域交通的工作重点已由大规模规划建设转移到高质量运行管理方向上来,传统的交通规划与管理、交通管理与控制学科理论方法面临着更新及挑战。2020年8月,中国科协在第二十二届年会闭幕式上发布了10个对科学发展具有导向作用的科学问题,其中第六个问题是:数字交通基础设施如何推动自动驾驶与车路协同发展?
一年来,国家密集出台了“交通强国”、“智能汽车发展战略”、“新基建”、“两新一重”、“十四个五年计划”多项与自动驾驶相关战略。2019年9月由中共中央、国务院印发的《交通强国建设纲要》,2020年2月由11个部委联合印发的《智能汽车创新发展战略》,2020年3月中央政治局会议提出《新基建》,2020年5月两会《政府工作报告》提出“两新一重”,2020年12月党的十九届五中全会通过的《中共中央关于制定国民经济和社会发展第十四个五年规划和二〇三五年远景目标的建议》等均对智能网联汽车行业发展进行了非常有针对性指导,这是国家战略层面对自动驾驶的推进,对加快建设交通强国作出专门部署,提出明确要求。伴随着新一代信息技术与人工智能的演进发展,交通工具汽车正在向高性能、新能源、无人驾驶等更高领域发展,道路交通基础设施也经历了低等级公路、高速公路、数字化、智能化的演化进程,一个绿色可持续、数字化、智能化、智慧化的交通基础设施建设已经成为人、车、路协同发展的共同目标。
交通是兴国之要、强国之基。在自动驾驶技术发展战略上,全世界呈现两条技术路线:一条是以美国所主导的“单车感知”自动驾驶方案;另一条是以中国引领的“网联感知”自动驾驶技术方案。两者的主要区别是:单车感知不依赖于外界环境的额外传感单元部署,主要依靠车辆的自身装配感知系统进行车身周围环境信息的获取;而网联感知需要借助在路侧安装额外的传感器、通信单元,以实现降低车身感知、计算能力的技术与成本需求,拓展车辆的感知范围和精度。由此可见,数字交通基础设施的建设与发展是支撑自动驾驶与车路协同的关键技术所在,开展这一领域研究势在必行,意义重大。

理论方法
新交通模式下,重塑交通出行体验,通过人、车、路、云之间车联与路联数据互联互通,实现智慧出行服务MaaS、智能网联汽车V2X、智能网联设施I2X、智能车路协同等构建新一代智能交通核心体系。
智能车路协同管控综合感知、通信、计算、控制等技术,基于标准化通信协议,实现物理空间与信息空间中包括“人、车、路、环境”四要素的相互映射,标准化交互与高效协同、利用边、端、云计算大数据能力,解决系统性的资源优化与配置问题。智能车路协同体系支撑的新一代智能交通系统核心四要素主要包括:
①人--智慧出行服务 MaaS:行为管理与诱导(行人、驾驶员、自动驾驶算法)系统;
②车--智能网联汽车 V2X:智能车载终端系统;
③路--智能网联设施 I2X:智能路测设施系统;
④环境--智能车路协同平台:区域交通与城市交通管理与控制决策可视化推演系统。
当前,国内外广泛关注智能车路协同体系支撑的新一代智能交通系统总体结构研究,总体上包含以下三条技术路线:
①人--智慧出行服务 MaaS+环境--智能车路协同管控平台组合路线;
②车--智能网联汽车 V2X+环境--智能车路协同管控平台组合路线;
③路--智能网联设施 I2X+环境--智能车路协同管控平台组合路线。
智能车路协同支撑的新一代智能交通系统总体结构详见图1所示。
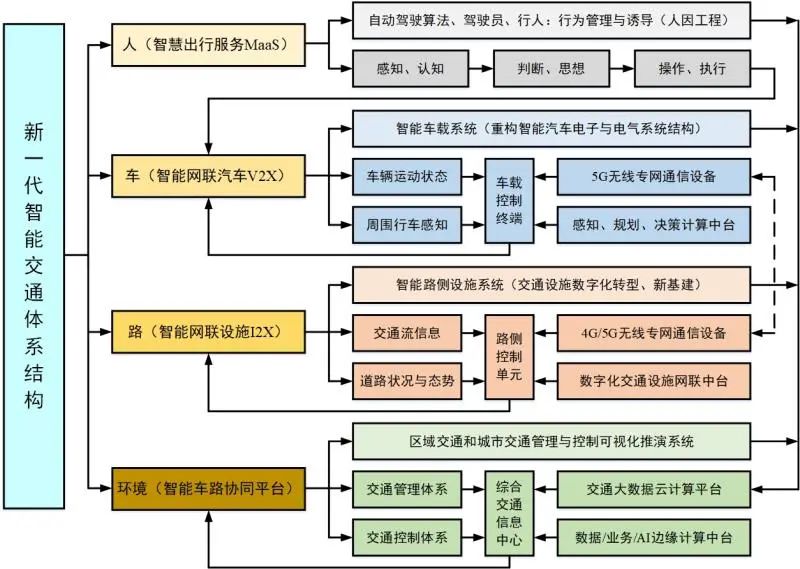
图1:智能车路协同支撑的新一代智能交通系统总体结构
智能车路协同管控平台为智能网联汽车及其用户、管理及服务机构等提供车辆运行、基础设施、交通环境、交通管理等动态基础数据,具有高性能信息共享、高实时性云计算、大数据分析、信息安全等基础服务机制,是支持智能网联汽车与智能网联设施融合需求的基础支撑平台,它包含了面向效率和面向安全两个方面的内容:面向效率包括基于智能车路协同信息的交叉口智能控制技术、基于车路协同信息的集群诱导技术、交通控制与交通诱导协同优化技术、动态协同专用车道技术、精准停车控制技术;面向安全包括智能车速预警与控制,弯道测速/侧翻事故预警、无分隔带弯道安全会车、车间距离预警与控制、临时性障碍预警等技术。智能车路协同管控平台利用LTE/5G-V2X宽带、低延时通信技术实现从终端到路侧边缘端再到云端的瞬时通信,对实时交通大数据进行分析和研判,对车辆安全和高效行驶提供信息服务(甚至是远程遥控)。
智能车路协同管控平台面向产业链应用,面向全行业提供体系化的安全,高效,节能等在内的汽车智能网联驾驶应用,以及包括共享汽车,电子支付等一系列新型汽车应用形态;为测试开发体系、公共服务体系、保险体系、医疗体系等提供协同化的实际业务应用。智能车路协同管控平台是政府部门利用政策优势为智能网联汽车行业发展提供的最直接的服务,也是未来城市智慧交通发展的必由之路。智能车路协同管控平台可由政府建设,成立专门的运营公司运营。运营智能车路协同服务的公司可以通过为车企、保险公司提供大数据服务盈利,为政府交通相关部门提供数据而实现社会效益。
2.1 智能车路协同感知
智能车路协同感知在结合现有的智能交通感知设备的基础上,增加了更加密切的路侧感知设备、车载感知设备和5G移动大数据。在车载单元感知设备主要包括激光雷达、毫米波雷达和带目标识别功能的视频摄像机设备;在路侧单元感知设备主要包括自动驾驶车辆能够感知到的数据,需要通过路侧单元RSU实时上传到边缘计算节点。
2.2 智能车路协同通信V2X
车联网面向应用的概念延伸,V2X智能车路协同通信技术是对D2D(Device to Device)技术的应用过程。它指的是车辆之间V2V,或者汽车与行人之间V2P、骑行者以及基础设施之间V2I的通信系统,可基于5G通信技术和LTE-V技术实现(5G车联网V2V通信的最大距离约为1000米,5G车辆网为V2X通信提供高速的下行和上行链路数据速率最大为1Gbit/s,5G车联网支持速度更快的车辆通信中车辆最大的行驶速度可达350km/h)。
2.3 高精度地图
高精度电子地图的绝对坐标精度更高且所含道路交通元素更丰富和细致,其中绝对坐标精度是指地图上某个目标和真实的外部世界的事物之间的精度;局部动态地图是统一描述道路交通动态环境的高精度地图,是判断车辆是否处于危险状态的重要参照(第一类为持续静态数据--地图数据,第二类为瞬时静态数据--路测基础设施,第三类为瞬时动态数据--拥堵与信号段,第四类为高度动态数据--车辆与行人)。
2.4 实时边缘计算
边缘计算(Edge Computing)在靠近物或数据源头的一侧,采用网络、计算、存储、应用核心能力为一体的开放平台,就近提供最近端服务。其应用程序在边缘侧发起,产生更快的网络服务响应,满足行业在实时业务、应用智能、安全与隐私保护等方面的基本需求。边缘计算处于物理实体和工业连接之间,或处于物理实体的顶端。而云端计算,仍然可以访问边缘计算的历史数据。对物联网而言,边缘计算技术取得突破,意味着许多控制将通过本地设备实现而无需交由云端,处理过程将在本地边缘计算层完成。这无疑将大大提升处理效率,减轻云端的负荷。由于更加靠近用户,还可为用户提供更快的响应,将需求在边缘端解决。
智能网联汽车掀起一场交通系统的革命,智能车路协同引发交通工程历史性变革,推动着交通规划与管理、交通控制与管理学科向科学化、精细化发展。实现交通系统跨域关联、全息感知与数据融合,交通载运工具与交通基础设施多基协同、交互操作,交通运输模式创新与智慧出行服务,新型智能化基础设施建设与智能运行维护等技术创新实践。智能网联汽车V2X与智能网联设施I2X强调“聪明的车”、“智慧的路”和”强大的网“需要紧密结合,迫切需要智能车路协同支撑智能网联汽车与智能网联设施一体化发展。面对新时代交通运输系统发生变革机遇,迎接智能网联汽车与智能网联设施的车路协同管控挑战,必须研发智能车路协同管控的关键技术与核心装备—车路协同控制机。

智能车路协同的单体耦合与群体管控技术
研发智能网联汽车的根本不是汽车,而是为了人们高效、安全、便捷地出行。智能车路协同作为智能网联汽车与智能网联设施的最终目标,是当今国际智能交通领域的前沿技术和必然发展趋势,是提高效率、优化能耗、降低排放的有效手段,将从根本上改变传统道路交通的发展模式,构建新一代智能交通体系。在智能网联与非网联、无人驾驶与有人驾驶混合交通模式中,网联化和智能化的发展,改变了交通系统内部诸元素的耦合关系。
智能车路协同这一技术起源于美国,到目前为止经历了2011年智能车路协同V1.0起步、2014年智能车路协同V2.0样车、2018年智能车路协同V3.0应用、2020年智能车路协同V4.0四个阶段,美国在这一领域一直处在领先地位。
3.1 智能网联汽车单体耦合技术
进入智能网联与非网联、智能驾驶与人工驾驶混合交通模式常态化时期,新一代信息技术车联网、大数据、云计算、移动互联的发展,为交通信息化和智能化带来了新的发展契机。智能车路协同系统将先进的信息技术与交通控制技术相融合,通过对交通信息感知、分析、挖掘、发布,实现人、车、路、环境之间的信息共享、协同管控。近年来,智能交通技术研究已从以解决交通管控为重点的阶段向以车与车、车与路通信为支撑的车路协同阶段发展。在可预见的未来,智能网联车和智能网联设施将与传统的人工驾驶的车辆在交通系统中共存,交通参与者、运载工具、基础设施一体化协同成为交通领域技术研究热点和难点。
随着自动驾驶和智能网联技术的逐渐成熟,人、车、路、环境系统耦合理论与优化方法是实现混行环境下车路协同运行的基础,其核心是揭示混行状态下驾驶人认知特性、车车运动特征和交通状态演化规律。显示了智能车路协同管控可视化推演平台在体系内部拟解决的四大科学问题、五大关键技术问题、开展五大主要研究内容的关联关系结构,其科学问题-关键技术-研究内容的关联关系结构详见图2所示。
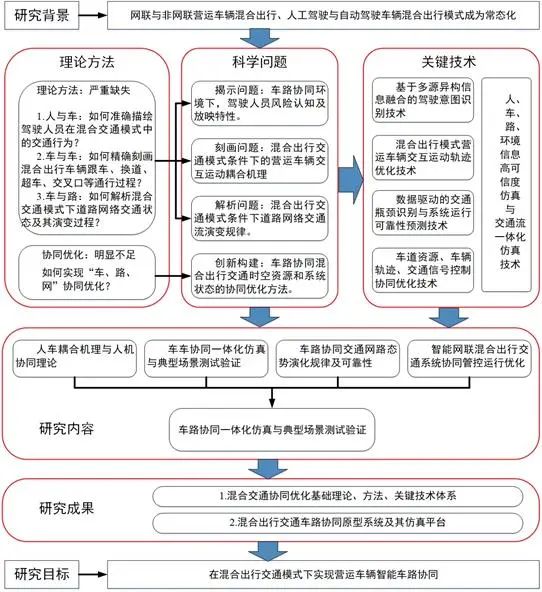
图2:科学问题-关键技术-研究内容的关联关系结构
注释:源自鲁光泉教授
在车辆智能网联与车路协同技术方面,美国通过推动车联网计划,开展了无线通信技术测试验证、立法等工作。欧洲启动了面向2020年的DRIVEC2X项目,正在进行Cooperative ITS路上测试工作。日本在道路交通情报通信系统和不停车电子收费系统ETC2.0基础上实施了Smartway项目。此外,美国、欧洲和日本均在实际道路上开展了货车车队自动运行测试,结果表明车路协同技术在提高燃油效率、减轻驾驶人负荷、提高安全性等方面效果显著。从国外的技术研究现状和发展动态来看,对于车路协同系统的研究已经有相当的规模和一定的成果,但许多关键技术和科学问题仍在探讨、试验和测试阶段。在国际社会未来的发展中,车与车、车与路协同式交通系统将是未来新一代智能交通的核心任务和发展方向,对于解决当前各国日益突出的交通拥堵、安全、污染问题有着极其重要的意义。
2010年“十二五”以来,国内在汽车安全辅助驾驶、车载导航设备、驾驶人状态识别、车辆运行安全状态监控预警、交通信息采集、车辆自组织网络等方面进行了大量研究,基本掌握了智能汽车共性技术、车辆运行状态辨识、高精度导航及地图匹配、高可靠信息采集与交互等核心技术。
智能化、网联化和协同化是新一代智能交通发展的三大重要趋势,智能安全辅助驾驶和车载信息服务已成熟应用,自动驾驶技术从实验室走向实际应用的步伐正在加快。我国布局研发车路协同系统,有着巨大的经济效益和现实可行的产业化前景。开展车路协同系统要素耦合机理与协同优化方法研究,解决车路协同系统中关键科学问题,有望使我国在智能车路协同领域实现对国际前沿技术的追踪、引领乃至占据国际研发制高点。
3.2 网联车辆群体智能管控技术
智能车路协同概念产生于本世纪初,以美国Connected Vehicles为代表。同期,引入交通大数据的智能网联与非网联混合交通群体控制理念,一经提出即得到世界各国高度重视,美国、日本、欧盟先后启动了国家研究计划。仅经过几年发展,基于智能车路协同技术的行车安全就被公认为是继安全带、安全气囊后的新一代交通安全技术,基于此理念形成的示范系统有美国MCity、荷兰ETPC、瑞典AstaZero和日本Jtown等。为加快车路协同技术的应用,美国麻省理工MIT大学、密歇根大学、明尼苏达大学等提出并建立了针对智能网联汽车评价的硬件在线仿真测试环境;2015年美国交通部还在纽约市、坦帕市和怀俄明州三地启动了智能网联汽车测试。
我国车路协同技术研究始于2012年,虽起步晚但发展迅速。2012年科技部在863计划中设立了我国首个车路协同关键技术研究项目,2014年清华大学牵头的项目团队研发了智能车路协同集成测试验证实验系统,同济大学研究并构建了车路协同系统仿真验证平台,随后国家分别在上海、重庆等地建立了智能网联汽车测试示范区。继首个国家863计划主题项目“智能车路协同关键技术研究”完成以来,我国在智能车路协同关键技术及其应用、系统平台和仿真评价等方面取得了卓越成果,在基于车路协同的新一代智能交通系统体系架构、多模式无线通信、车速引导与信号控制优化、四跨(跨模组、跨终端、跨厂商、跨平台)互通互联集成等方面取得了整体国际先进、部分国际领先的成果。
随着车路协同的进一步发展和推广应用,人、车、路、环境一体化的交通系统智能网联与非网联、无人驾驶与有人驾驶混合交通模式常态化已经成为现实,基于全时空交通信息的协同感知、融合和交互,研究车辆群体智能决策与协同控制理论方法及其关键技术已成为必然。国外近年来逐渐开始关注以智能网联车辆为对象的新型混合交通协同管控问题,但研究仍处在初级阶段,尚未形成实用的理论与方法体系;而国内依托在智能车路协同技术及其系统平台的发展优势,已在车辆群体决策与控制的系统架构、优化方法和小规模实车试验等方面开展了创新性的研究工作,走在了世界前列。
为适应未来车路协同技术与系统的发展需要,提升道路交通管理与控制水平,智能车路协同管控可视化推演平台在体系外部拟解决的关键科学问题。智能车路协同管控可视化推演平台在体系外部研究内容及其相互关系图3所示。
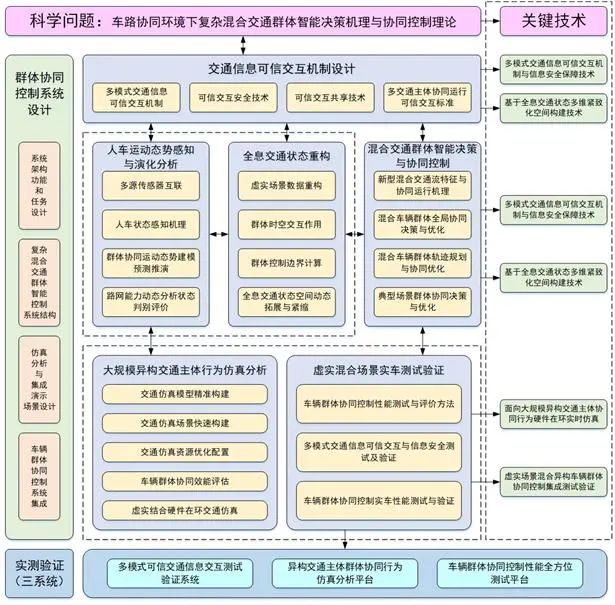
图3:智能车路协同管控可视化推演平台在体系外部研究内容及其相互关系
注释:源自张毅教授
未来,随着智能车路协同管理与控制技术研究的不断深入,新型复杂混合交通系统在状态感知、信息交互、协同控制和虚实仿真验证四个层面,必将催生从低维传感器信息融合向多维网联协同感知、从离散交通主体主被动协同控制向大规模群体智能群策群控、从V2X支持的实时信息交互向混合交通主体间的可信交互、从小规模运行效能仿真分析向大规模虚实结合与硬件在线仿真验证的衍化趋势,这是智能车路协同环境下交通群体智能决策与协同控制研究的重点内容。
- End
-
得州电价疯涨近200倍:电网设施老旧、新能源发电受阻等所致2021-02-20
-
2020全球新能源销量排行榜,欧洲新能源市场实现华丽转身2021-02-08
-
新能源和自动驾驶领域正迎来新的投融资热潮!2021-02-07
-
总结+预测:2021年新能源乘用车七大趋势2021-02-02
-
新能源汽车造车跑马圈地运动正在兴起,合肥能弯道超车吗?2021-02-02
-
2020年汽车市场大幅下滑,新能源汽车异常火爆2021-01-28
-
新能源汽车混战,对抗特斯拉2021-01-28
-
奥迪一汽新能源合资公司将落户长春,计划投资超300亿元2021-01-19
-
无序竞争、盲目发展现象严重,新能源汽车行业如何“去泡沫”?2021-01-19
-
中汽数据最新终端零售数据出炉!理想ONE成新能源SUV销冠2021-01-12
-
2020年中国新能源汽车行业报告2021-01-12
-
5品牌8款车齐聚新能源车展2021-01-11
-
油改电失速,吉利新能源押注SEA2021-01-10
-
i-VISTA第二批智能汽车出炉:新能源VS传统燃油车2021-01-08
-
北京2021年新能源小客车指标额度达6万2021-01-08