电动机座壳体零件使用传统虎钳装夹难以保证技术要求,使用气动翻转夹具,一次能同时装夹四个工件,满足正面与底面同心度要求,同时减少定位误差。这种多工位翻转夹具的设计思路如下:

图1 铸铝电动机座壳体
PART 01 工艺分析
零件为异性多面体,加工面两两成90°关系,在没有五轴的情况下,考虑在三轴上设计气动翻转夹具。
工序1,在另一加工中心上采用虎钳装夹,并且在加工过程中预加工A、B两处,作为后期加工的工艺定位销(这两处对其产品性能及外观无影响)。
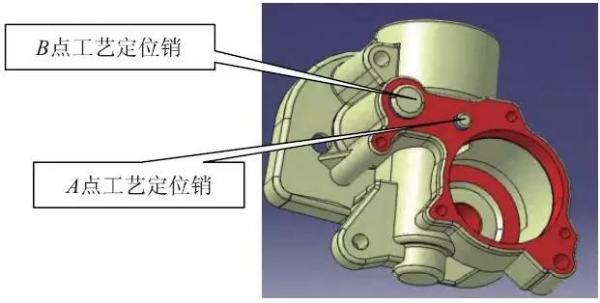
图2 底面3D(工序1)
工序2和工序3(见图3和图4),在气动翻转夹具上同时装夹完成。
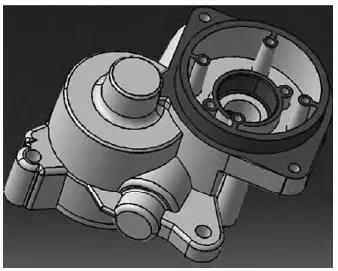
图3 上面3D(工序2)
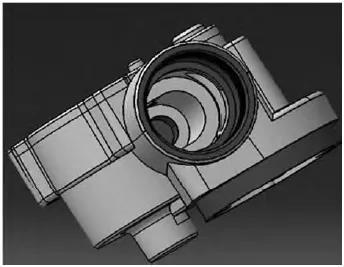
图4 螺纹面3D(工序3)
PART 02 夹具设计原理
按常规加工,在完成工序2和工序3时,需经2次装夹才能完成。气动翻转夹具能同时加工四个零件,主要由底板、活动翻转工作台、旋转支承轴、支承板、V型导向限位支承块、翻转用气缸和转向压紧用气缸组成。
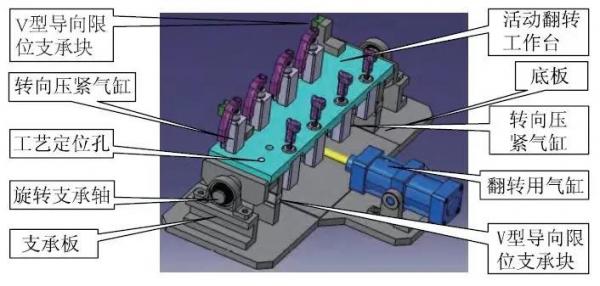
图5 夹具本体
PART 03 夹紧装置设计
3.1 V型导向限位支承块设计
左、右2组共4件V型导向限位支承块组件,能够实现双向定位水平状态及垂直状态的位置限制,还可以起到辅助支承力的作用,提高其活动翻转工作台的刚度,并对翻转用气缸起到行程限位的作用。
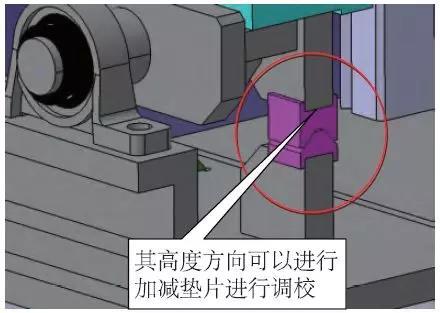
图6 V型导向限位支承块
3.2翻转用气缸设计
将翻转用气缸运动设计在活动翻转工作台的中心下部,除了均衡推力外作为附加的支承保持活动翻转工作台的刚度,同时节省工作空间及收缩不必要的加工避空。
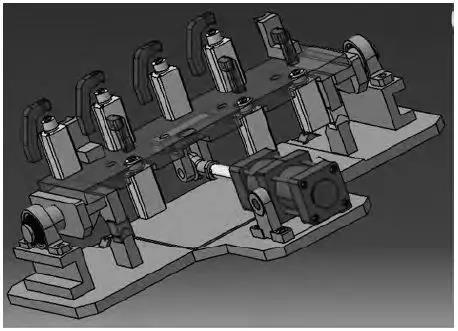
图7 翻转用气缸位置图
3.3 转向压紧气缸设计
零件采用一面两销定位装夹在活动翻转工作台上,并通过转向压紧气缸一次同时完成4个工件的夹紧。装拆工件时,上、下2面共10个转向压紧气缸同时将压块提升或下压,这样就有取件的空间,压块大致位于工件的对称面,均衡下压力,从而达到夹紧。
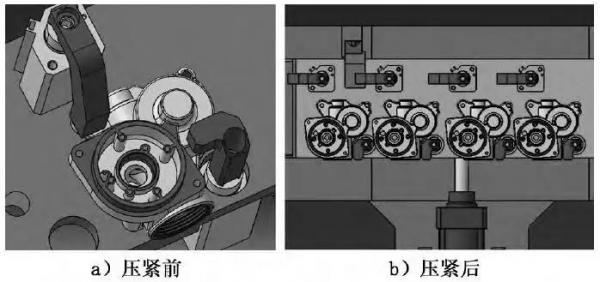
图8 转向压紧气缸压紧前、后状态
PART 04 夹具的使用
在夹具翻转用气缸推出时,转向压紧气缸打开,将零件通过一面两销定位装夹,转向压紧气缸闭合后压紧工件,翻转用气缸保持推出状态,这时工件背部的V型导向限位支承块是完全贴合的,启动CNC进行此面加工,夹具在工序2的状态如图9所示。
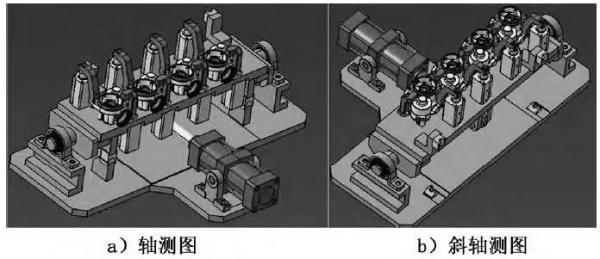
图9
加工完上述面后,转向压紧气缸压紧的动作保持不动,翻转用气缸收缩,令活动翻转工作台作90°翻转,通过工件侧面的V 型导向限位支承块作用,从而保证其垂直度及旋转前后的位移误差,这样就实现了1次装夹加工2道工序。夹具在工序3的状态如图10所示。
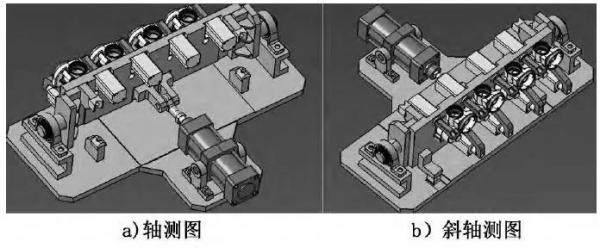
图10
PART 05 其他加工细节
工件加工时均采用成型刀一次性加工完成。因为零件本身是铝铸件壳体,其壁薄、异型,加工余量少,且有圆度等要求,采用成型刀是通过轴心旋转加工,获得的圆尺寸会比走轨迹的更圆,加工壳体圆上各点受力均衡。



