自动驾驶知多少——执行控制篇
自动驾驶知多少——执行控制篇本篇是自动驾驶的里面业界提的最少的一部分。所以今天就来说说这个执行控制机构相关。因为业内涉及自动驾驶企业中,除了传统具备底盘控制相关业务能力的零部件供应
本篇是自动驾驶的里面业界提的最少的一部分。所以今天就来说说这个执行控制机构相关。

因为业内涉及自动驾驶企业中,除了传统具备底盘控制相关业务能力的零部件供应商之外,很大一部分新企业都做到规划决策这一层,执行控制的部分依然交给车企与供应商。
然而,执行控制是自动驾驶真正落地的基础。感知定位如同驾驶员的眼睛,规划决策相当于驾驶员的大脑,而执行控制就好比驾驶员的手脚。并且规划决策无法和执行控制剥离,对执行控制缺乏了解,决策就会无从做起。
这一点可以从当下自动驾驶的商业合作案列中看出,想率先推出自动驾驶量产车的合作团队中,都有在执行控制上具备深厚积累的供应商。
1,不能脱离手脚谈大脑
做好规划决策,必须懂得执行控制。
简单来看,路径规划可以分为全局规划和局部规划。其中全局规划是为车设计一条从A到B的安全通过的路线。局部规划是指某段路程的环境信息和车辆自身状态来规划一段无碰撞的路径。前者就像在地图上输入起点终点生成路线,后者就像路上的拐弯,变道,超车,遇到施工等车辆运动,这部分和执行控制的关系就密切起来了。
大脑和手脚是如何互相影响的呢?
举个栗子,在感知定位无误的情况下,一个自动驾驶车辆原本只想变道超个车,却撞到了路边?

一般来说,局部规划中,自动驾驶车辆考虑外部环境,车辆状等一系列约束条件,模拟老司机安全驾车给出一个理想的局部路径,小角度的切入换道,把指令传达给相关执行机构。但是理想和现实发生了偏差,比如说没有很好的考虑车辆动力学因素,转向特性估计不足,刹车特性估计不足等等因素导致车辆会出现顿挫,导致车辆刹不住车,或者转弯过度,产生危险。
当然还有个原因可能是底层协议的开放性不足,目前的控制协议很大一部分都是付费公开,即便公开,很有限的接口开放程度也直接影响着汽车操控的可调程度。
所以很多自动驾驶企业,都说外包改装一辆车花了多少钱,很快上路,但是调试很久都没有特别显著的进展,可能也是其中一个因素。

2,那么,执行控制机构的核心技术是什么呢?
电控化是现在的发展趋势,这也是随着车辆电控程度越来越高后,自动驾驶也慢慢的火热起来。一般来说控制系统由三大部分组成。
(1)线控油门
这个就不聊了,现在很成熟的技术,通过发送电信号来控制节气门的开合程度或者电动机,这个已经在很多车型上使用了。
(2)线控转向
这个相对来说普及程度不高,有一些乘用车的量产产品。比如说英菲尼迪Q30等,不过,一般来说目前的EPS与线控转向相比,差距只在方向盘与车轮之间的连接并非采用线控,而是依然采用机械连接,所以很多都是在EPS上进行改造。有成熟EPS技术一般都掌握在国外主流供应商手中,所以很多自动驾驶企业的车辆基本上都是外包。真正自己有核心技术的比较少。在商用车上,现阶段还没有量产产品,所以基本都是样件统一天下,价格比较贵,而且不稳定,卡脖子严重。
(插一个小广告,西井自主研发线控转向,已经在我们多款车型上有应用,对,就是这么刚!)
(3)线控制动
其实这个要比以上两个还要难,线控制动最早在F1上有应用,但是价格昂贵,而且差不多行驶2000km左右就得更换,维护成本高。
目前也有一部分车辆上有量产,比如Model S,奥迪R8 e-tron等。不过还是受限于成本和性能,现在主要用在后轮驱动上,前轮还是传统的制动技术。
因为制动技术非常复杂,在ADAS时代,大多数智能技术都集中于制动技术,比如ESP,ACC,AEB等。
线控制动其实就是以电子元件来取代液压或者气压控制单元,现在业界主流成为EHB(electronic hydraulic brake)电子液压制动,EMB(mechanical)电子机械制动两种。
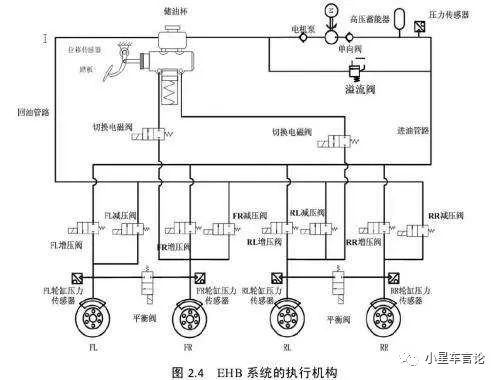
EHB和EMB主要区别在于制动力来源。EHB的制动力是由液压蓄能器来提供,EMB是由电机来提供。来源不同,各有优劣。
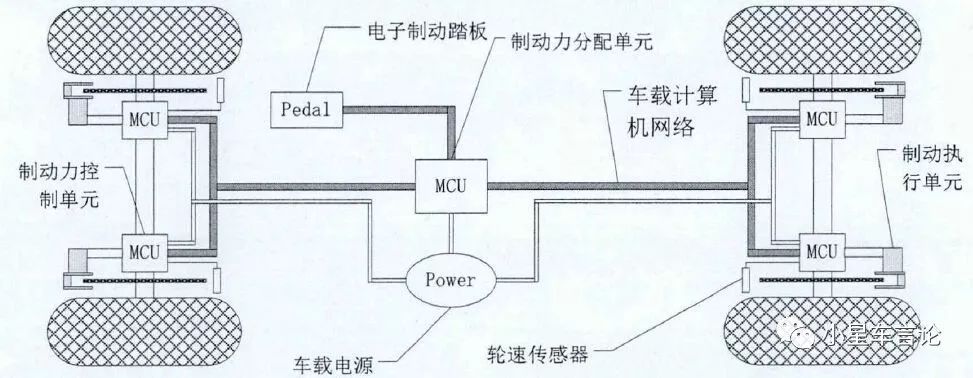
(上图是EMB原理)
EHB因为由蓄能器可以连续多次提供制动压力,和传统制动相比,液压制动阀安装位置灵活,比如说安装在靠近制动器位置时,可以缩短管路,减少液压阀的使用,避免过长管路带来的消耗。同时因为与传统制动结构相差不大,所以不需要重新进行系统设计,而且在紧急情况下可以直接向前轮施加制动压力,不需要备用系统。
EMB相比传统液压制动,电信号响应速度快,制动性能得到优化,结构简化,省去复杂液压控制结构,所以维护成本低,此外,电动机驱动的方式便于增加电控功能,便于进行系统改进设计。更重要的是EHB由于技术复杂,所以基本上都是国际巨头控制,所以新兴市场EMB更有竞争优势。
长远来看,EHB是EMB的过渡阶段。像bosch的iBooster,大陆的MK C1以及ZF的IBC都是EHB范畴。
当然EMB劣势也非常明显
(1)线控制动功率受限于电动机功率,很多车内空间有限,所以永磁电动机尺寸受限,因此功率也不高,导致制动力不足。
(2)制动片一直处于高温的工作情况下,同样因为空间问题,在电机选择上必须使用永磁电动机,刹车时,长期高温会导致永磁电动机消磁。
(3)EMB系统有半导体元件被安装在制动片附件,高温对半导体元件是一个非常大的考验。
(4)需要独立驱动电源,12V提供不了所需能量,一般24V或者48V。
(5)线控制动的可靠性还没有得到完全的测试和验证。
3,面对国外技术壁垒,国内怎么办?
最近中美贸易,各种限制华为,海康等等的新闻频出,很多人忧虑,要是也限制波及到汽车行业怎么办?其实就是发展到现在,我们也是一直喊汽车大国,大国不是强国。或许有些悲观,但是至少现阶段汽车行业里的大多数技术,国外还是领先我们的,所以他们不会放弃中国市场。我真心希望我们在汽车行业里多多努力,说句不好听的话,到时候他们限制我们的时候,我们很自豪的说,嘿,我们都有备胎。

但是现在还有点遥远,我们一直在努力。
好了,这些话就不说了,不然又像上次被屏蔽。
回归技术话题。
明明自动驾驶刚起步,为什么国内企业和国外企业在执行控制部分存在如此大的差距呢?
首先,自动驾驶是基于汽车行业发展而来的,国外供应商利用时间积累下的优势。执行控制产品研发讲究工程化,主要依靠数据积累,要经过不停的测试和模型优化。在技术研发层面,至少需要几年时间对一线工程数据进行调试,采集,优化,标定,才能对底盘控制有个初步理解,国外供应商在此方面都有一大批至少拥有20年以上的一线经验工程师,专职持续进行优化迭代。

相比而言,国内供应商相对技术底子薄,大多为生产型供应商。另外国内整体环境相对比较浮躁,技术员工流动性比较大,即使对公司来说,愿意在一个项目上稳定持续投入10年左右的,也非常少。这也是导致在上一代EPS,ABS等技术积累不足的情况下,要想在这一阶段跃升到线控系统,比较困难。
此外,博世,大陆等供应商在感知决策部分也有自己的产品,掌握了摄像头,毫米波雷达,激光雷达等传感器部件和系统,并且不少已经成熟量产,符合车规级要求。靠多年的工程能力和汽车经验,在这次热潮中,虽然2018年中国汽车销量低迷,但是博世等也是收获满满。
当然对国内供应商来说也是有优势的地方。
自动驾驶在国内对应用环境的需求更高,国内比国外跑得快,车厂摆脱国外零部件供应商垄断的意愿也十分强烈。自动驾驶不同部分的关联也在提示着合作的重要性。目前国内也有一些企业在电控制动上进行布局,诸如万向,亚太,万安科技,拓普集团等,主要和国内品牌汽车制造商进行合作开发,在封闭的商用车领域,国内供应商将更有竞争优势。
相信在2020s的上半段,国内很多企业将占有自动驾驶浪潮中的一席之地。
上一篇:江苏移动5G战略进军智慧医疗项目
-
机器“快递员” 用自动驾驶货车送货上门2019-06-04
-
机器“快递员”用自动驾驶货车送货上门2019-06-04
-
自动驾驶汽车的端到端学习2019-06-04
-
安波福联手Lyft完成5万次自动驾驶出租车服务2019-06-04
-
第22周自动驾驶周刊丨华为成立智能汽车解决方案BU;英伟达获杭州市自动驾驶路测牌照2019-06-04
-
做自动驾驶的“开路先锋”,自主泊车真的准备好了吗?2019-06-04
-
自动驾驶处于快速发展期,5G商用为其注入“催化剂”2019-06-04
-
ADI与Momenta合力加速自动驾驶高精度地图产业化2019-06-04
-
美国自动驾驶三巨头:解决魔鬼般的行驶场景细节2019-05-28
-
自动驾驶知多少-执行控制篇(智能汽车7)2019-05-28
-
自动驾驶圈出现”另类收购案”,两家初创企业抱团取暖2019-05-28
-
拥有硅谷“无人车”自动驾驶基因 格兰博扫地机CH350-G评测2019-05-28
-
L3智能驾驶控制算法及验证、自动驾驶道路测试与数据采集、场景挖掘2019-05-28