以上过程听起来似乎并不复杂,但要处理好还是有很大难度的,比如实现机器人回环问题时,如果匹配算法不够精准,或在现实环境中存在很多干扰,可能出现绕环境一圈后,原本该闭合的一个环形走道被断开了。
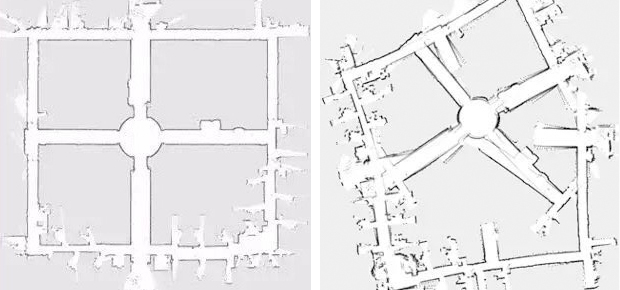
比如正常地图应该像左边图这样,但如果处理不好,就有可能变成右边图的样子。
在环境较大的场景中,回环问题是不得不面对的,但在现实中即使是像激光雷达这种高精度的传感器,也难免会存在一些误差。该问题的难点在于在刚开始出现些许误差时并不易发掘,直到机器人绕着环路一圈,才发现误差的累加,但此时发现已经晚了,环路闭合问题已很难解决了。当然该问题也并不是完全无解,一个好的商用化SLAM系统便能很好的解决回环问题。回环问题能否很好的解决,也成为评判该系统实力的指标了。
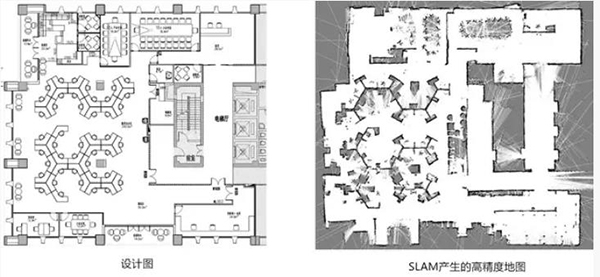
以上是思岚科技工作人员在办公室进行的测试,左边的视频是基于开源的ROS机器人操作系统进行的地图构建,右边的是基于SLAMWARE构建的地图。当机器人绕场一周后,ROS构建的地图出现了中断,而SLAMWARE构建的地图是一个完美的闭环,它与思岚科技办公室的设计图完美重合。



