7 记忆(Memory)
记忆是任何系统级认知模型的必要部分,不管这个模型是用来学习人脑还是解决工程问题的。几乎所有的体系都有记忆系统来储存计算的中间结果,能够学习并适应变化的环境。然而记忆系统的特殊执行非常不同并且依赖于研究目标和概念限制,比如生物可信度和工程因素(编程语言、软件体系、框架使用)在认知框架论文中,记忆被期限(长期、短期)和类型(过程性的、陈述性的、语义的)所描述。
多储存记忆模型受Atkinson-Shi?rin模型的影响,之后被Baddeley 修改。这种记忆机制在心理学中占主流,但它在工程上的效用被很多人质疑,因为它并没有为很多记忆机制提供一个效用介绍。然而,大部分体系在记忆类型上不同,尽管命名惯例因为概念背景而不同。比如,为计划和解决问题而设计的体系有短期和长期的记忆系统。计划中的长期知识经常是指为事实和解题规则服务的知识,这和语义以及程序性的长期记忆有关。一些体系也能保存之前被执行的任务和被解决的问题,模仿情景记忆。计划中的短期记忆经常被现实世界的模型和目标的内容表示。
图8为各种记忆架构的可视化。这里我们遵循一个惯例来区分长期和短期的储存。长期储存又被进一步分解成语义的、程序化的、情景的类型,分别储存事实性知识,一定条件下的动作信息和系统的个人经历情景。短期记忆被分为感官记忆和工作记忆。感官记忆是非常短期的缓存区,能够储存一些近期的感知。工作记忆是一种暂时储存关于现有任务的感知。
7.1 感官记忆
感官记忆的用途是为了缓存输入的感知并在转换到其他记忆体系前做预处理。同样地,声像记忆能使声音刺激持续足够长的时间来做认知合并和特征提取,比如声调提取和分组。在感官记忆中,视觉数据的衰退率被认为是10个毫秒,声音数据更长,尽管时间限制并不总是被特别指明。其他执行这一记忆类型的机构包括soar, sigma, ACT-R, CHARISMA, CLARION, ICARUS 和POGAMUT.
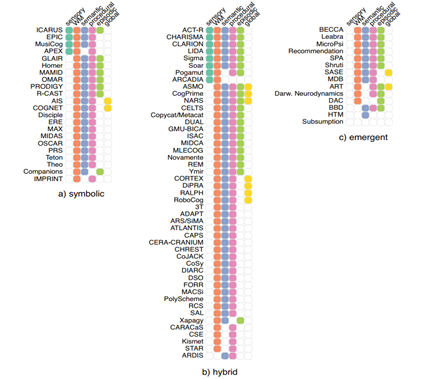
图8
7.2 工作记忆
工作记忆可以被定义为和现有任务相关的短暂信息储存机制。它对一些认知能力非常重要,比如注意力、推理和学习,因此,我们列表上的每个认知体系都会以某些形式执行它。工作记忆的特殊呈现主要区别于哪些信息被储存,它是怎样被表达、被访问和被维护的。另外,一些感官体系有助于正在进行研究关于编码、操纵和维护信息的过程,以及在人类的工作记忆中它与其他人脑过程的联系。
尽管工作记忆对人类认知很重要,相对较少有论文提供关于它的内部组织和与其他模块联系的足够细节,它通常被概括为:“现有的世界状态”或“传感器中来的数据”。基于这些文件,我们推断,许多工作记忆体系是作为当前世界模型,现有目标/系统状态的高速缓存存储器。尽管现在工作记忆的能力没有明显的极限,新的目标或新的感官数据经常覆盖现存的内容。这一被简化的工作记忆能在许多的符号范式体系中找到。
更多工作记忆的感官可信模型使用一种激活机制。一些最早的工作记忆内容的激活模型在ACT-R中被执行。像之前一样,工作记忆中保有最多的相关知识,是从有偏差决定的长期记忆中恢复的。偏差是指激活,还包括有各种路径的基础级别的激活(可能上升或下降),来自邻近元素的分散激活。一个元素的激活度越高,它就越有可能进入工作记忆并直接影响系统的行动。这被应用在基于图的知识表达中,节点代表概念,权重被赋予到边缘上对应概念之间的联系。
自然地,激活也能被用在神经网络的表达上。另一个常见典范,把记忆表示为目标的存储共享,能被并行模块读取并改变的问题和部分结果。解决问题的方法是不断地更新共享的短期储存信息。在一些机器人科学的体系里,自我意识领域中,除了能为时空结合赋能还能为环境中的机器人提供实时的位置和方向信息。
同样的,Kismet 和 RoboCog使用基于相机坐标系的地图来保存近期获取的兴趣区的信息。为了防止无限成长,记忆中信息的数量需要被限制。比如,在ARCADIA中,有3-6个物体;在CHREST中,有4个组块;在 MDB中,有20条信息。然后,当新的信息来到时,最老的和最不相关的信息会被删除来避免过载。信息也能被丢弃,如果长时间不用的话。在推荐体系中,一个不同的方法可以使得工作记忆中的3-4个信息从记忆系统的体系中自然出现,不需要外部参数设定。
7.3 长期记忆
长期记忆可以长时间保存大量的信息。特别地,它被分解成隐性知识的程序性记忆(动作技能和常规行动)还有陈述性记忆包括(显性)知识。后者被进一步分解成语义(,事实的)和情景的(自传体的)记忆。长期记忆中的显性/隐性和陈述性/程序性维度之间的二分法经常被合并。其中的一个例外是CLARION, 其程序性和陈述性的记忆是分开的,并且被分解成一个隐性和显性的部分。这个区别被保存在知识表达的层面:隐形知识用类似于神经网络的分布式亚符号范式表征,而显性特征拥有一个明显的符号范式表征。
长期记忆可以存储先天知识,因此几乎所有体系都执行程序性或语义记忆。程序性记忆包含在任务领域中完成任务方式的知识。在符号范式生产系统中,程序性知识是被因特殊领域而预编码的或学习的”如果-然后“规则所代表。其他的变种包括感知运动模式、任务模式和行动脚本模式。在涌现范式体系中,程序性记忆可能包含状态-行动对序列或代表感官运动联系的人工神经网络。
语义记忆储存关于物体和它们之间关系的事实。在支持符号范式推理的体系中,语义信息被类网络的本体所执行,节点对应着概念,连接代表他们之间的关系。在涌现体系中,事实知识被网络中的激活模式所表示。
情景式记忆可以储存以往经验中的特例,如果相同的情景再次出现的话,这些之后能够被再利用。这些经验也可以被用来学习语义或程序性知识,比如CLARION保存动作导向的经验,例如 “输入、输出、结果”,并使用他们来影响未来的行动。
7.4 全局记忆
尽管有证据支持不同的记忆系统,把不同的知识或长短期的记忆分开,使用统一体系来存储系统中的所有信息。比如,CORTEX和Robocog使用一种综合的、动态多图像目标。同样地,AIS执行一种全局记忆,可以结合知识库,中间推理结果和系统的认知状态。DiPRA使用模糊认知地图来代表目标和计划。NARS将所有的经验知识当作Narcese中的正式语句,无论是陈述性的、情景式的或程序性的知识。同样,在一些涌现系统中,例如SASE和ART中,作为工作或长期记忆的神经元的作用是动态的,并且与神经元是否(发放)激活有关。
总的来说,认知体系中的记忆研究主要考虑体系、表达和检索。因为智能代理的领域和时段通常是被限制的,有关保存大量记忆的挑战只有相对比较少的关注度。对比之下,早期的人类长期记忆能力的估计值是在1.5千兆位内或10万个概念内,然而最近的发现表明人脑的能力可能更大。然而,尽管可获得的计算能力有所提升,依然不可能通过简单执行来达到人类记忆的最低估计量。因此,其他的方案包括使用现有方法来管理大规模数据并改进提升检索算法。两种方法都被探索过,前者是Soar和ACT-R,使用PostgreSQL关系型数据库从WordNet中加载概念和关系,后者是伴生体系。或者,SPA支持关联记忆的生物可信模型,有能力表达超过10万个概念在脉冲神经网络WordNet中。
未完待续
8 学习(Learning)9 推理(Reasoning)10 元认知(meta-cognition)11 应用及讨论



