步骤
1.准备与设定Intel Galileo
Galileo是Intel第一款设计给DIY玩家与自造者的开发板,其具备的功能刚好适合这次的喷水对战机器人专题。因为在Galileo开发板的底部设有PCI-E Mini插槽,所以可以将无线网络卡接在这个插槽上,进而制作出一台无线遥控机器人。这次专题中使用到Galileo社群所提供的ConnectAnyThing韧体,
韧体下载页面:https://github.com/IntelOpenDesign/ConnectAnyThing
这套工具让你能简单地使用手机来撰写程序并进行控制,所以出门时只需带着喷水战车和手机就可以了。
1a.一开始请先下载编写IntelGalileo程序代码时会用到的软件,此为Intel Galileo所适用的Arduino IDE(https://communities.intel.com/docs/DOC-22226)。下载文件并解压缩,便可看到名为arduino-1.5.3-Intel.1.0.3的数据匣,用鼠标在arduino.exe上点两下即可启动ArduinoIDE。
1b.成功开启Arduino IDE后,先把Galileo上的MicroSD记忆卡拿下来,再接上5V的电源供应器,先用USB传输线将Galileo连上计算机。
1c.此时需要先测试一下Galileo能否正常运作,你可以加载Blink范例程序(图1)来进行测试,如果正常的话,你可以看到Galileo上有一颗LED在闪烁。
2.设定Wi-Fi通讯
2a.由于本专案希望能透过无线遥控的方式来控制机器人,因此选用Intel Centrino Advanced-N6205无线网络卡,先将附有U.FL接头的2.4GHz黏着式天线装到网络卡上。接着为了使网络卡更好安装在Galileo上,必须要加装MINI PCI-E网络卡转接座,因为转接座有正反两面之分,所以在组装网络卡与转接座时,请注意方向是否正确,最后再将装有转接座的网络卡固定在Galileo上便完成了。
2b.为了要能顺利使用ConnectAnything来遥控机器人,以及透过手机实时修改程序,你需要设定Wi-Fi通讯。请准备一个容量大于2GB的MicroSD记忆卡,先到先前附注的GitHub网站下载ConnectAnything韧体,必须注意的是请根据你所使用的Intel Galileo型号来选择韧体版本,假设你使用的是Intel Galileo Gen 1,那只能下载Rev 0.2.2之前的版本。
2c.将下载完成的ConnectAnyThing.zip档案解压缩,并把所有档案复制到记忆卡卡中。便可以把记忆卡卡装回Galileo上,如果有按照上面的步骤安装Wi-Fi网络卡,接上电源大约开机1分钟之后,再拿出手机搜寻可用的无线网络联机即可看到名为ConnectAnyThing的热点。
3.电源方案
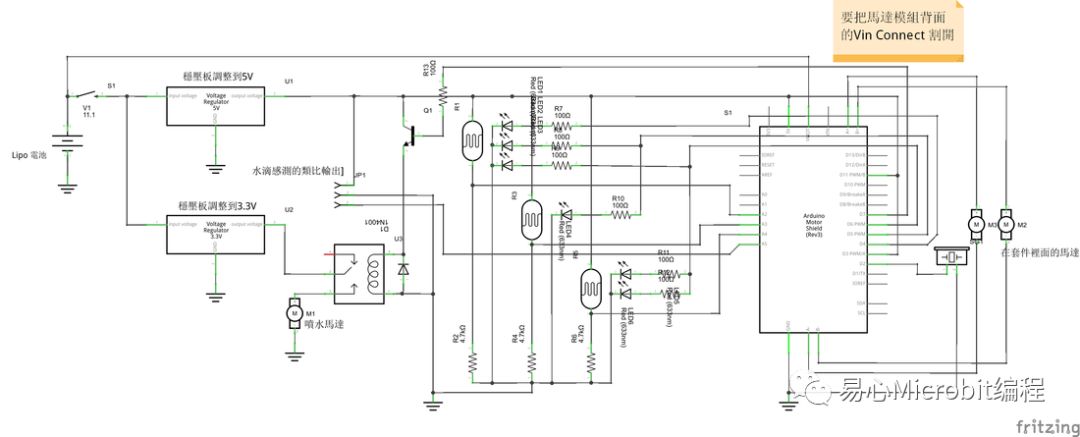
当你将Intel Galileo以及相关软件都设置完成之后,便可开始制作喷水对战机器人的主要控制部分。我先用Fritzing画出了这台战车的电路图,在图中可以看到我用两个LM2596直流降压模块,把电池所提供的11.1V电压分别调成5V和3V。5V的部分主要给Intel Galileo使用,3V则提供给抽水马达使用。
3a.在此有两点需要注意,第一点要让马达扩充板可以顺利使用11.1V的电压,第二点则是要防止11.1V的电压流进Galileo中,所以我把马达扩充板的背面的Vin Connect焊点用美工刀切开,便可以把供应11.1V电压的输入端接到马达扩充板上的端子台Vin脚位(图3a)。因为刚刚已经把背面的Vin切开了,所以这个Vin现在只提供给马达使用的。
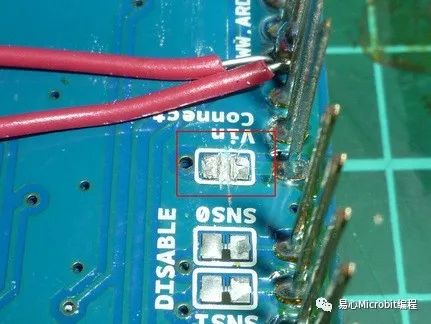
图3a
3b.我先用排针将11.1V转5V的降压模块固定在万用电路板上,再把连接电池用的公T型接头焊到降压模块的输入端(图3b)。

图3b
3 4


