8.设定针脚与数字电路图(Android4.4.2版本)
8a.当你开启手机的Wi-Fi联机时,可能会跳出请你登入的画面,如果看到这个画面请选择(Not Now),并之后开启手机内建的浏览器,连到:www.cat.com(图8a)。
8b.若要新增数字或模拟的脚位,请用右下角的绿色加号来选取数字脚位,再用左下角的黄色加号来选取模拟脚位(图8b),表格A为此台机器人的脚位功能。
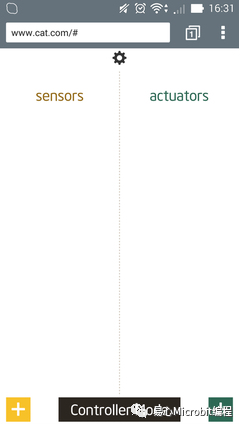
图8a
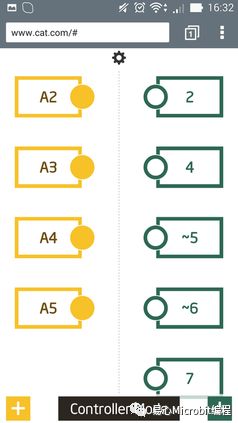
图8b
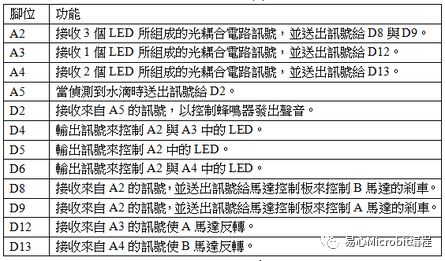
表A
8c.接着则需要将线路连接起来,先点选左边模拟脚位上的黄色圆圈,再点选右边数字脚位上的绿色圆圈即可完成联机,请依照图8c所示将线路连接完毕。
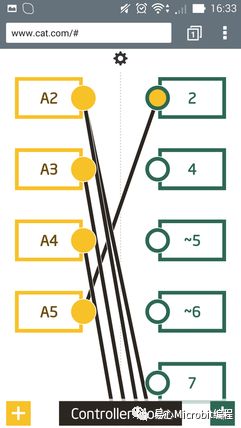
图8c
8d.接着可以针对模拟与数字脚位进行编辑,首先点选A2的字,跳出设定选单将「Invert」选项勾起来,之后点选「OK」便可离开选单。因为ConeectAnyThing可以实时监控各个脚位,所以此时你可以看到A2的背景变成全灰,但如果开发板上并没有接任何线路的话,背景并不会产生任何改变。
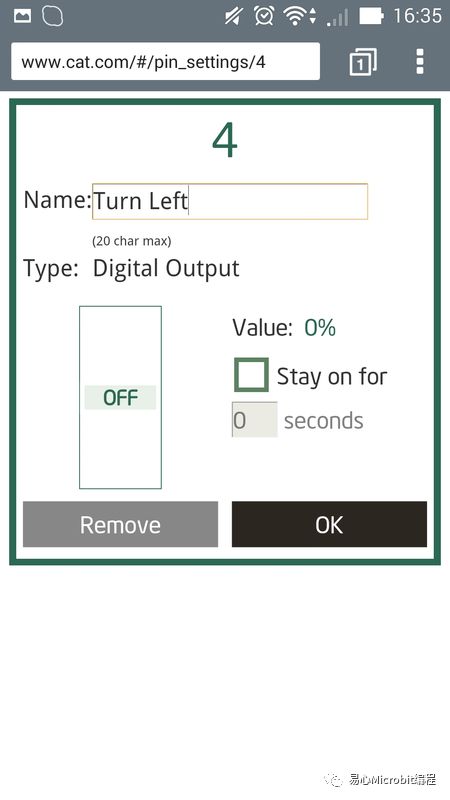
如果要编辑数字脚位,只要按下绿色框,便可开启数字脚位的选单,为了方便记忆脚位功能,可以在PIN Label中输入名字(图8d)。
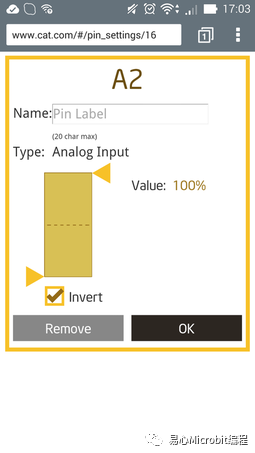
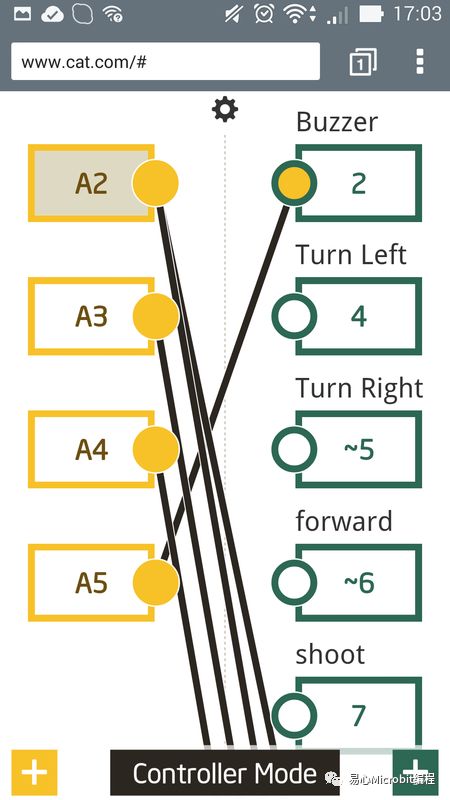
图8d
8e.按下在选择脚位画面下方的ControllerMode便可进入控制模式(图8e),在控制模式中,你可以将图中「forward」的箭头拉到最右边,再进入A2的控制模式中,将左方的横杆位置移到正中间,当你这样做之后,马达控制板上连接马达正负极的LED应该会亮起,转动马达使机器人顺利往前进。
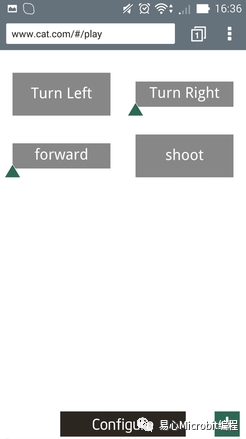
图8e
9.ConnectAnyThing的控制程序
ConnectAnyThing的控制方式与Arduino并不同,无法用一个键同时控制两个脚位的电位,所以我利用A0~A5输出讯号给数字脚位,设计出使用LED和光敏电阻的光耦合电路,透过LED发出亮光,待光敏电阻接收后,再利用ConnectAnyThing把接收到的讯号回传数字脚位上。
机器人向前走:
//马达A正转
digitalWrite(12, LOW);//让马达A正转
digitalWrite(9, LOW);//松开马达A剎车
//马达B正转
digitalWrite(13, LOW);//让马达B正转
digitalWrite(8, LOW);//松开马达B剎车
机器人向右转:
//马达A正转
digitalWrite(12, LOW);//让马达A正转
digitalWrite(9, LOW);//松开马达A剎车
//马达B反转
digitalWrite(13, HIGH);//让马达B反转
digitalWrite(8, LOW);//松开马达B剎车
机器人向后走:
//马达A反转
digitalWrite(12, HIGH);//让马达A反转
digitalWrite(9, LOW);//松开马达A剎车
//马达B反转
digitalWrite(13, HIGH);//让马达B反转
digitalWrite(8, LOW);//松开马达B剎车
在上述所有程序代码中,由于我们在数字电路图中将A2定义成反向,所以D12与D13的正反转电位要相反,并且要将控制马达剎车的D8与D9设定在松开的LOW电位上。
10.组装
这里使用尺寸为170mm×90mm的压克力板当作放置电路的底板,并在板子中央钻洞来让马达控制板的线路穿过以连接底盘的马达(图10a)。而在履带式底盘上有几个螺丝孔,你可以拿压克力板对一下螺丝孔的位置,再用10mm长的螺丝将四个角落固定住。你也可以在压克力板上标出安装隔离柱的位置,以便你固定Galileo与其他电路(图10b)。
安置好所有电路之后,又用四片压克力将底板盖起来,并将正面设计为斜面用来装设水滴传感器与连接喷水马达的水管,除了正面的外壳需要钻洞以外,其他部分只需要注意防水是否完备即可。如果将管口用束线带稍微绑紧,就可以让射出的水柱力道增强。建议不要将储水用的塑料瓶放在外壳内,以避免震动使其翻覆造成电路短路。

图10a

图10b
开始对战!

作者:郭有迪
<上一页 3 4


