技术方案
设计如图3新型的自动焊接翻转夹具,包括用于工件的定位和提供焊接平台的工作台;设置在工作台两侧的用于支撑工作台的支座;设置在支座内的驱动机构,驱动机构间通过连接机构实现驱动工作台翻转。
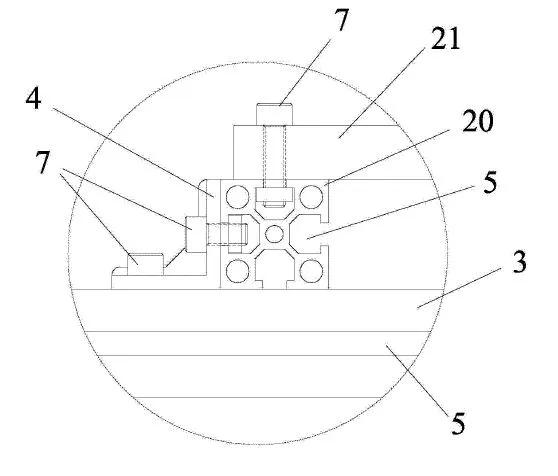
图4 A面剖视图
3.支架4.连接块5.连接槽7.螺丝
20.调节支架21.法兰
在图3方案中,工作台为组装式结构,可根据工件的加工量或实际需求相应地改变工作台的尺寸和规格,有利于按照不同规格工件的按需布设。两个支座分开设置的,中间没有固定连接,可按需移动,适应长短不同的工件。
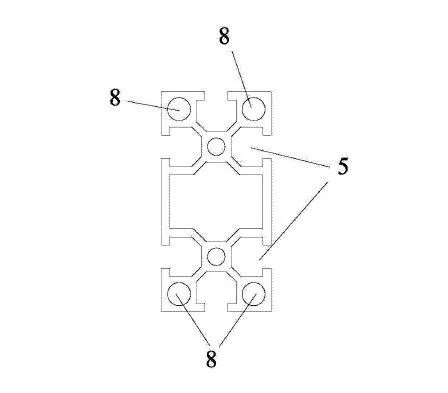
图5支架示意图
5.连接槽8.通孔
组装式工作台是指,工作台包括由若千支架组装构成的基架。支架为型材支架,可采用标准件型材,也可根据加工需求选择不同的规格,进而相适应组装成不同尺寸的基架。
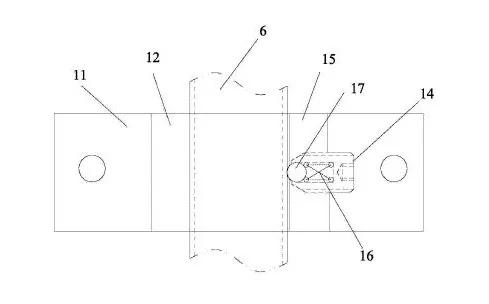
图6定位装置一
6.工件11.底座二12.定位部14.弹性件
15.固定件16.弹簧17.钢珠
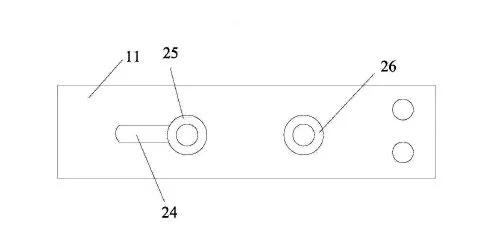
图7定位装置2
11.底座二24.长槽孔25.弹性件26.定位部
将工件定位在工作台上的定位装置如上所示,上面的底座通过紧固件和连接槽与支架连接实现定位装置与工作台连接。底座上的压紧部与定位部相对,实现压紧部对紧靠于所述定位部的工件弹性定位,有效并且快速。



