完成后按照以上步骤安装另外三条腿,安装完毕后如图16所示。
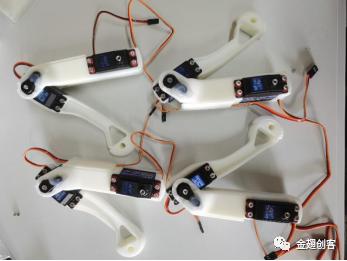
图16丨 安装完毕四条腿
肩部组装
接下来安装肩部舵机臂,修剪原装的舵机臂使得满足3D打印件所留的凹槽,然后用热熔胶固定。

图17丨 肩部舵机臂的安装
安装完肩部舵机臂后,需要将其安装到之前安装好的大腿上,固定之前注意调整舵机的旋转角度。

图18丨 安装肩部舵机打印件
接下来安装肩部舵机,注意舵机的齿轮与打印件背面凸起的小圆柱对应。

图19丨 安装肩部舵机
对所有的腿部重复以上步骤,完成四条腿的肩部舵机的安装。
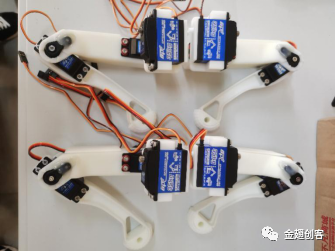
图20丨 完成四条腿肩部舵机安装
身体组装
完成以上腿部安装后,接下来安装机械狗的整个身体部件,其所有身体部件如图21所示。
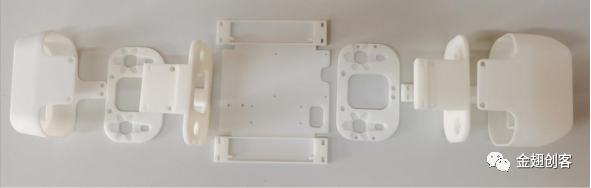
图21丨 身体部件
对于机械狗身体的安装,按照图21所示顺序,依次安装,需要注意的是头部和尾部有些打印件十分相似,需要注意细微差别,不要用错零件。身体组装完成后如图22所示。

图22丨 组装完成的身体部件
组装身体部件时不要把每个孔位固定太紧,给组装四条腿留有拆卸的空间,注意四条腿安装的方向,不要安装反了。装上之前组装好的四条腿后基本大功告成,如图23所示。

图23丨 躯体组装完毕
电路组装
对于机械狗电路的搭建主要参照图24,首先电源处接入一个船型开关,便于开断电源,然后接入稳压模块给树莓派供电,另外无需降压直接给舵机驱动板供电,然后舵机驱动板连接机械狗的12个舵机。除此之外,树莓派的IIC接到舵机驱动板和液晶屏上(如果有的话)。
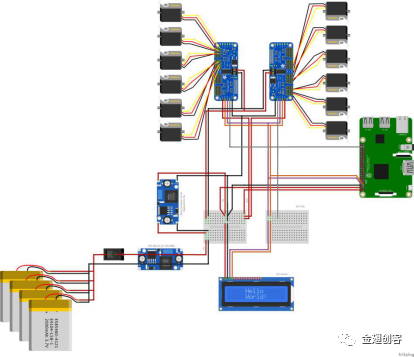
图 24丨 电路搭建图
Part 03
机械狗软件部分搭建
首先需要利用balenaEtcher烧录软件给树莓派的TF卡烧录系统,完成后给树莓派插上卡并开机,完成系统的烧录。注意:本次所烧录的非树莓派官方提供的系统镜像,而是一个基于Ubuntu 16.04搭建的机器人优化过的系统,里面很多环境都已经配置好了。
图25丨烧录软件
因为此项目开源(https://github.com/mike4192/spotMicro),所以接下来我们需要做的就是在树莓派上创建一个ROS工作空间,然后将源代码拷贝到工作空间的src文件夹中,然后退回到catkin_ws文件夹目录下开始编译过程。编译完成后就可以按照项目里的提示进行每个舵机的校准,完成校准后就可以快乐的玩耍了。
基本命令有stand、walk、idle和angle_cmd,输入stand机械狗会站立起来;输入walk后,小狗会原地踏步,使用wasd控制其前进后退左移右移,使用q和e控制其左转和右转;输入idle后小狗恢复初始伏地状态;输入angle_cmd后可以利用w、s、a、d、q和e控制俯仰角、横滚角和偏航角。
声明
欢迎转发本号原创内容,任何形式的媒体或机构未经授权,不得转载和摘编。最终解释权归金翅创客所有。



